


產(chǎn)品分類
更多相關(guān)產(chǎn)品
- LGZN-SZ02L型智能制造數(shù)字孿生虛擬仿真實(shí)訓(xùn)室
- LGGY-DS23型大田耕種機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS22型物理除草機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS21型大田作業(yè)機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS20型果園噴霧機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS19型果園采摘機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS18型果園應(yīng)用開發(fā)通用平臺實(shí)訓(xùn)裝置
- LGGY-DS17型智能割草機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS16型雙臂復(fù)合機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS15型七自由度機(jī)械臂實(shí)訓(xùn)裝置
- LGGY-DS14型六自由度機(jī)械臂套件實(shí)訓(xùn)裝置
- LGGY-DS13型具身復(fù)合機(jī)器人創(chuàng)新設(shè)計(jì)套裝實(shí)訓(xùn)裝置(增強(qiáng)版)
- LGGY-DS12型便攜式ROS導(dǎo)航機(jī)器人學(xué)習(xí)平臺實(shí)訓(xùn)裝置
- LGGY-DS11型基于大模型的智慧零售平臺實(shí)訓(xùn)裝置
- LGGY-DS10型農(nóng)業(yè)智能車實(shí)訓(xùn)裝置
- LGGY-DS09型智能服務(wù)機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS08型ROS基礎(chǔ)教學(xué)智能車實(shí)訓(xùn)裝置
- LGGY-DS07型視覺語音智能車實(shí)訓(xùn)裝置
- LGGY-DS06型人形機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS05型6足18自由度圓形仿生機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS04型無人駕駛深度學(xué)習(xí)智能車實(shí)訓(xùn)裝置
- LGGY-DS03型商服機(jī)器人-機(jī)械臂版及場地實(shí)訓(xùn)裝置
- LGGY-DS02型計(jì)算機(jī)視覺平臺實(shí)訓(xùn)裝置
- LGGY-DS01型智能汽車及賽道實(shí)訓(xùn)裝置
- LGGY-Z08型智能制造綜合產(chǎn)線
- LGGY-SJ03型機(jī)器人視覺分揀螺母工作站實(shí)訓(xùn)系統(tǒng)
- LGGY-WH05型工業(yè)機(jī)器人維護(hù)維修基礎(chǔ)教學(xué)工作站
- LGGY-F6A型服務(wù)機(jī)器人應(yīng)用技術(shù)實(shí)訓(xùn)平臺
- LGGY-K50型工業(yè)機(jī)器人應(yīng)用工作站
- LGGY-R04型工業(yè)機(jī)器人一體化實(shí)訓(xùn)平臺
- LGGY-R02B型智能生產(chǎn)線運(yùn)行與維護(hù)綜合實(shí)訓(xùn)裝置
- LGGY-T03A型智能制造單元系統(tǒng)集成應(yīng)用平臺
- LGGY-W01A型工業(yè)機(jī)器人應(yīng)用工作站
- LGGY-S2型工業(yè)機(jī)器人與智能視覺系統(tǒng)應(yīng)用實(shí)驗(yàn)平臺
- LG-MPS02型模塊化柔性自動化生產(chǎn)線實(shí)訓(xùn)系統(tǒng)(八站)
- LGJ-IMS03型工業(yè)機(jī)器人模塊化智能生產(chǎn)線實(shí)訓(xùn)系統(tǒng)
- LGJ-KY02型智能機(jī)器人智能制造綜合實(shí)操工作站
- LGJ-QBJ01型工業(yè)機(jī)器人模擬汽車領(lǐng)金沖壓集成制造實(shí)訓(xùn)系統(tǒng)
- LGJ-CNC02型工業(yè)機(jī)器人智能生產(chǎn)流水線實(shí)訓(xùn)平臺
- LGJ-ZH03型工業(yè)機(jī)器人組合式應(yīng)用實(shí)訓(xùn)裝置
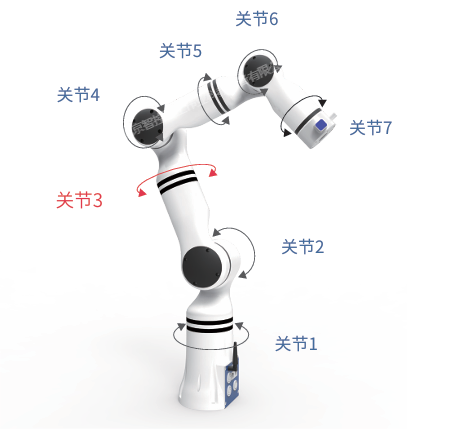
LGGY-DS15型七自由度機(jī)械臂實(shí)訓(xùn)裝置
1、外殼材質(zhì):鋁合金;
2、自由度:不小于7個(gè)自由度;
3、工作半徑:不小于600mm;
4、重復(fù)定位精度:±0.05mm;
5、額定負(fù)載:不小于4.5kg;
6、※控制器:須集成于機(jī)械臂本體;
7、※凈重(含控制器):不大于8kg;
8、※額定輸入電壓:不大于26V;
9、※功耗:最大功耗≤200W,綜合功耗≤100W;
10、本體防護(hù)等級:IP54;
11、控制器接口:不少于1個(gè)RJ45接口、不少于2個(gè)USB接口、不少于1個(gè)外部擴(kuò)展接口;
12、控制方式:不少于4種,至少包含拖動示教、示教器、API、RS485;
13、通訊方式:不少于4種,至少包含WIFI、網(wǎng)口、USB串口、RS485;
14、支持編程語言:至少支持C、C++、C#、Python;
15、關(guān)節(jié)運(yùn)動范圍:J1不大于±178°、J2不大于±130°、J3不大于±178°、J4不大于±135°、J5不大于±178°、J6不大于±128°、J7不大于±360°;
16、關(guān)節(jié)最大速度:J1-J2不小于175°/s、J3-J7不小于220°/s;
17、※機(jī)械臂末端集成:末端不少于2個(gè)可復(fù)用IO;輸出電源最大支持24V1.5A;1路RS485接口,支持MODBUSRTU協(xié)議;
18、※配套資源:須提供適配機(jī)械臂的示教器系統(tǒng),且示教器支持多平臺使用。示教器中可進(jìn)行工具標(biāo)定、工作坐標(biāo)系標(biāo)定、碰撞等級設(shè)置;提供機(jī)械臂相對應(yīng)的URDF文件,可進(jìn)行基于Moveit的仿真規(guī)劃;提供ROS功能包;1份機(jī)械臂的用戶手冊;1份機(jī)械臂的ROS使用書;須提供windows與Linux2個(gè)版本的SDK文件。
19、維護(hù):提供診斷軟件工具;具備斷電零位保存功能;具備關(guān)節(jié)異常狀態(tài)保護(hù);
20、設(shè)備需提供Linux基礎(chǔ)教程、Python基礎(chǔ)教程、機(jī)械臂ROS使用教程、機(jī)械臂實(shí)訓(xùn)手冊共4份電子文檔供設(shè)備后續(xù)使用;
21、※示教器及負(fù)載演示:投標(biāo)現(xiàn)場需進(jìn)行機(jī)械臂負(fù)載5公斤運(yùn)行演示,演示動作包含:機(jī)械臂關(guān)節(jié)2正負(fù)90°,其他關(guān)節(jié)0°,此動作完成3次循環(huán);跨平臺機(jī)械臂示教器分別在Windows、Linux系統(tǒng)演示示教運(yùn)動與在線編程實(shí)現(xiàn)機(jī)械臂運(yùn)動;