


更多相關產品
- LGZN-SZ02L型智能制造數字孿生虛擬仿真實訓室
- LGGY-DS23型大田耕種機器人實訓裝置
- LGGY-DS22型物理除草機器人實訓裝置
- LGGY-DS21型大田作業機器人實訓裝置
- LGGY-DS20型果園噴霧機器人實訓裝置
- LGGY-DS19型果園采摘機器人實訓裝置
- LGGY-DS18型果園應用開發通用平臺實訓裝置
- LGGY-DS17型智能割草機器人實訓裝置
- LGGY-DS16型雙臂復合機器人實訓裝置
- LGGY-DS15型七自由度機械臂實訓裝置
- LGGY-DS14型六自由度機械臂套件實訓裝置
- LGGY-DS13型具身復合機器人創新設計套裝實訓裝置(增強版)
- LGGY-DS12型便攜式ROS導航機器人學習平臺實訓裝置
- LGGY-DS11型基于大模型的智慧零售平臺實訓裝置
- LGGY-DS10型農業智能車實訓裝置
- LGGY-DS09型智能服務機器人實訓裝置
- LGGY-DS08型ROS基礎教學智能車實訓裝置
- LGGY-DS07型視覺語音智能車實訓裝置
- LGGY-DS06型人形機器人實訓裝置
- LGGY-DS05型6足18自由度圓形仿生機器人實訓裝置
- LGGY-DS04型無人駕駛深度學習智能車實訓裝置
- LGGY-DS03型商服機器人-機械臂版及場地實訓裝置
- LGGY-DS02型計算機視覺平臺實訓裝置
- LGGY-DS01型智能汽車及賽道實訓裝置
- LGGY-Z08型智能制造綜合產線
- LGGY-SJ03型機器人視覺分揀螺母工作站實訓系統
- LGGY-WH05型工業機器人維護維修基礎教學工作站
- LGGY-F6A型服務機器人應用技術實訓平臺
- LGGY-K50型工業機器人應用工作站
- LGGY-R04型工業機器人一體化實訓平臺
- LGGY-R02B型智能生產線運行與維護綜合實訓裝置
- LGGY-T03A型智能制造單元系統集成應用平臺
- LGGY-W01A型工業機器人應用工作站
- LGGY-S2型工業機器人與智能視覺系統應用實驗平臺
- LG-MPS02型模塊化柔性自動化生產線實訓系統(八站)
- LGJ-IMS03型工業機器人模塊化智能生產線實訓系統
- LGJ-KY02型智能機器人智能制造綜合實操工作站
- LGJ-QBJ01型工業機器人模擬汽車領金沖壓集成制造實訓系統
- LGJ-CNC02型工業機器人智能生產流水線實訓平臺
- LGJ-ZH03型工業機器人組合式應用實訓裝置
LGGY-F6A型服務機器人應用技術實訓平臺
一、技術平臺總體要求
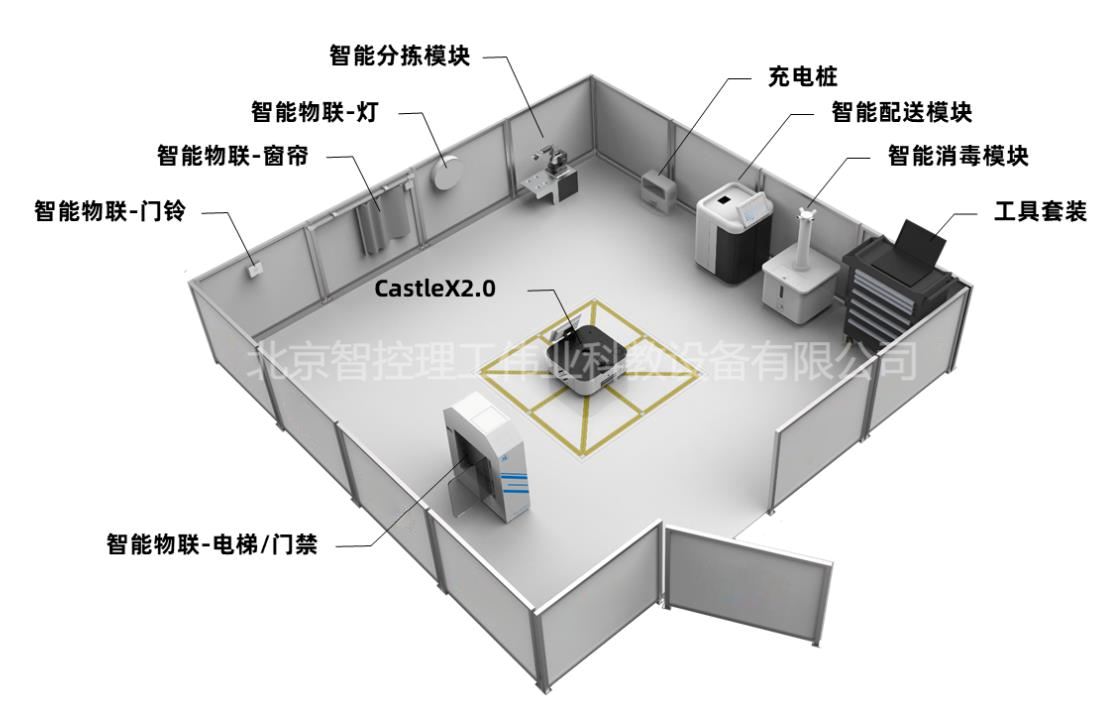
技術平臺是基于通用的機器人操作系統(ROS)開發,可用于LINUX及ROS系統框架教學,C++,Python編程教學,也可用于算法驗證和二次開發。配備激光雷達、深度攝像頭、防跌落傳感器、超聲波傳感器,具有同步定位與地圖構建(SLAM),路徑規劃、語音交互和自動回充等功能,可拓展性強,頂層可選擇搭載分揀模塊、消毒模塊、配送/送餐模塊,配合機器人視覺系統可應用智能分揀、消毒、配送、送餐、導覽、巡檢等應用場景的服務機器人實訓,完成人物料分揀、貨物派送、人臉識別、定點導航、多點巡邏等任務。
二、技術平臺主要設備技術參數
1.控制器參數
(1)CPU性能≥I5-10200u;
(2)MCU性能≥F407VET6;
(3)使用Ubuntu系統;
(4)內存≥8G DDR4;
(5)硬盤大小≥128G M.2 SSD;
(6)外部接口:USB 3.0接口數量≥4個,COM接口≥2個,音頻接口≥1個,RJ45千兆網口≥2個,在響應文件中提供投標產品實物圖片,圖片中能體現各接口的數量;
(7)顯示接口:HDMI 2.0,VGA;
(8)輸入接口:≥1路急停開關接口,1路防撞觸邊傳感器接口,1路防跌落傳感器接口,6路超聲波測距傳感器接口,2路數字輸入,1路TYPE-C串口接口;
(9)輸出接口:2路PWM,2路DC-24V電源輸出,5路DC-12V電源輸出, 2路DC-5V電源輸出,1路TYPE-C串口輸出,1路CAN口輸出。
2.移動管理系統參數
(1)移動類型:差速移動;
(2)車輪類型:橡膠輪、萬向輪;
(3)車輪數量:≤6個;
(4)車輪負載能力≥30kg;
(5)電機數量:≥2個;
(6)電機碼盤精度≥17-bit;
(7)電機內置溫度傳感器;
(8)輪胎外徑≥169mm;
(9)電機電氣和性能:額定輸出功率160W,額定電壓24VDC,額定轉矩8N·m,瞬間最大轉矩15 N·m,額定轉速200rpm,最高轉速500rpm,額定相電流14A,瞬間最大電流27A,編碼器1400P/R,單邊出軸方式。
(10)機器人需在狹窄的空間(600*600mm)內工作,機器人需滿足狹窄空間工作要求,需提供相應的支撐材料。
3.電氣系統參數
(1)超聲波裝置:
數量:≥2個
工作頻率:≤40kHz
探測有效距離:1cm~500cm
探測分辨率:0.5cm
探測誤差:±0.5%
接口類型:TTL(單線模式和雙線模式可切換)
方向性偵測范圍:定向式(水平/垂直)65度圓錐
(2)2D攝像頭
數量:1個
感光元件類型:CMOS
默認速度:30幀/秒
信噪比:39dB
工作溫度:-20~70℃
動態范圍:56dB
輸出分辨率:320*240/640*480/1280*720/1920*1080
輸出格式:MJPG/YUY2(默認MJPG)
像素:200萬
接口類型:USB2.0
(3)3D攝像頭
數量:1個
深度范圍(米):0.6m-6m
深度圖分辨率:1280x1024@7FPS,1280x960@7FPS,640x480@30FPS,320x240@30FPS,160x120@30FPS
彩色圖分辨率:1280x960@7FPS,640x480@30FPS,320x240@30FPS
精度:3mm@1m
深度FOV:H58.4° V45.5°
彩色FOV:H62.7° V49°
延遲(毫秒):30ms-45ms
數據傳輸:USB2.0或以上
供電方式:USB
(4)電池
數量:1個
電壓:24V
容量:30AH
電池類型:鋰電池
(5)光電傳感器
數量:≥1個
檢測方式:反射式,正面檢測
連接方式:導線引出型
檢測距離:10mm~4000mm
感應角度:30-40°圓錐角
可檢測物體:Φ1mm以上透明/非透明物體
(6)激光雷達
尺寸:≤63mm*63mm*93.5mm
重量:≤550g
測量半徑:8m
采樣頻率:15Hz
角度分辨率:0.33°
(7)IMU模塊
通信方式:串口輸出
橫滾角、俯仰角靜態誤差:0.8°
橫滾角、俯仰角動態誤差:2.5°
(8)急停按鈕
數量:≥1個
(9)觸摸屏
屏幕類型:LCD
數量:1個
屏幕尺寸:≥10英寸
分辨率:1920x1080@60HZ
屏幕連接方式:HDMI
(10)揚聲器
數量:≥1個
聲道:2.0
(11)麥克風
硅麥數量:≥6個
頻響范圍:100HZ-16KHZ
靈敏度:-38dBV/Pa
信噪比:65dB
工作電流:300mA
接口類型:USB2.0
(12)物聯網模塊
數據服務:LTE(
LTE-FDD:最大 10Mbps(DL)/最大 5Mbps(UL)LTE-TDD: 最大7.5Mbps(DL)/最大1Mbps(UL)),GSM(EDGE: 最大 236.8Kbps(DL)/最大 236.8Kbps(UL)GPRS:最大 85.6Kbps(DL)/最大 85.6Kbps(UL))
頻段:LTE-FDD: B1/B3/B5/B8,LTE-TDD: B34/B38/B39/B40/B41
數據連接:Max 10Mbps(DL)/ Max 5Mbps(UL)
接口:USB
功耗:2W(max)
(13)磁導航模塊
供電電壓范圍:DC 9~36V
最大消耗電流:55 mA
檢測靈敏度:0.5 mT
通信接口:RS-485\CAN
檢測通道:16通道
檢測極性:N極
檢測有效距離:5~50 mm
使用溫度范圍:-20~+80 ℃
響應速度:1 ms
(14)自動回充模塊
充電電壓:24V
信號顯示:回充模塊內,紅燈正在充電,綠燈已充滿或未充電
(15)驅動器
控制方式:SVPWM 調制,閉環矢量控制
速度控制精度:±1rpm
電子齒輪:(1~9999)/(1~9999)
位置控制精度:±1pulse
制動方式:全新的再生能耗制動方式
過載能力:按實際最大電流計算過載倍數,過載持續15s
數字量輸入:8 路光耦隔離輸入
數字量輸出:4 路光耦隔離輸出,OC 輸出接法
模擬量輸入:2 路:-10V ~ +10V,運算放大器輸入緩沖接口,電氣不隔離
編碼器輸入:支持光電式、磁式等增量編碼器
脈沖輸入:單脈沖正負邏輯、雙脈沖正負邏輯和正交脈沖正負邏輯六種輸入方式
通訊總線:DS232、DS485、CAN
通訊協議:Modbus、Canopen
4.機器人控制系統軟件
(1)底盤系統控制軟件具有移動坐標控制及路徑規劃功能,能夠自動導航到目標位置。
(2)具有SLAM功能,能夠完成地圖的重建,導航避障并且能夠自動導航到目標位置。
(3)具有讀取超聲波傳感器、激光雷達傳感器、防跌落、2D相機和3D相機等傳感器數據功能。
(4)物體識別功能:可通過與機械臂組合,通過機械臂攝像頭對識別物體,并可通過機械臂抓取物體。
(5)底盤控制:可通過配套鍵盤手動控制機器人底盤運動
(6)具有語音喚醒功能,能通過語音喚醒機器人。
(7)具有語音識別功能,能識別語音輸入,并顯示識別結果。
(8)具有語音合成功能,能合成自定義文本的語音音頻,并播放。
(9)具有語音控制機械臂抓取物體功能,通過與機械臂結合,及提供的程序范例,可實現通過語音輸入,控制機械臂2D相機完成物體識別,控制機械臂完成物體抓取的功能。
(10)具有自主搬運物體功能。通過與相關功能模塊的結合,可實現語音輸入,離線命令詞識別,機器人能自動完成路徑規劃、導航避障、物體識別、機械臂控制等。
5.機器人電氣設計及驗證系統
(1)系統支持對移動機器人電氣系統進行設計、驗證,支持檢查機器人電氣系統設計缺陷。
(2)系統包含完整的元器件庫,支持自定義元器件,包含≥36,000個組件的數據庫。
(3)直觀的分析。
(4)系統具有直觀設計驗證功能,可在設計過程中更及時優化設計的性能,并在減少原型迭代次數的情況下確保電路滿足技術要求。系統包含≥20種直觀測量儀器以便將性能視覺化。支持在機器人編程軟件中不斷擴展自定義仿真分析庫,用戶可以視覺化特定領域的設計。
(5)快速設計功能。
(6)系統支持將移動機器人電氣設計圖轉換為PCB,具有完整的電子表格查看功能保證有效的設計迭代管理。
2 智能消毒模塊 一、智能消毒模塊總體要求
智能消毒模塊能精準高效地消滅病菌,迅速降低病菌密度,確保消毒過程的高效性。同時,它能識別并專注于需要消毒的區域,避免對其他不需消毒的區域造成損害或污染,實現精準的消毒操作。為確保安全性,智能消毒模塊具備安全性能,能保證操作人員的安全,避免因操作不當或設備故障導致的意外傷害。
二、智能消毒模塊主要設備技術參數
▲(1)超聲波加濕≥3核,霧化出口≥3個;提供滿足此功能的實物照片;
(2)支持使用的消毒液:過氧化氫、次氯酸等(消毒液需另購);
(3)具有拆卸式ROS-WH控制接口,能實現信號、電源等模塊化傳輸;
(4)采用模塊化設計,和通用服務機器人能組合成完整的消毒機器人;
(5)噪聲不高于40dB,內置DC-12V風扇;
(6)結合通用服務機器人,可實現語音控制自動導航消毒;
▲(7)具有防干燒功能;提供滿足此功能的實物照片;
(8)可通過自檢程序對消毒機器人的硬件狀態進行檢測。
3 智能導覽/巡檢/配送三合一模塊 一、智能導覽/巡檢/配送三合一模塊總體要求
智能導覽/巡檢/配送三合一模塊具備多場景適配能力,能根據需求實現導覽、巡檢、配送功能。三合一模塊與通用服務機器人結合后,針對巡檢功能,三合一模塊能自動規劃巡檢路徑,根據機器人當前位置和巡檢點的位置,設計最合理的巡檢路線,提高巡檢效率,并能通過預設的程序或指令,自動執行巡檢動作,記錄巡檢過程;針對導覽功能,可概括為精準定位、實時更新、多元化信息、個性化推薦、易用性、數據分析、節能環保、安全可靠、適應性強以及可擴展性;針對配送功能,能根據訂單需求和配送規則完成智能路徑規劃和優化,以提升配送效率。
二、智能配送模塊主要設備技術參數
(1)≥800W像素高清攝像頭,根據部署的訓練模型能實現目標檢測的功能,并傳給服務端實現實時檢測;
(2)高清廣角攝像頭,能識別障礙物,并根據訓練的模型實現目標檢測的功能,并傳給服務端實現實時檢測;
(3)頭部預留通用服務機器人觸摸屏安裝位置,結合通用服務機器人底盤觸摸屏,具有機器人人機交互界面,可提供人機交互功能,空閑時顯示動態的擬態化臉部表情;
(4)具有拆卸式ROS-WH控制接口, 能實現信號、電源等模塊化傳輸;
▲(5)采用模塊化設計,和通用服務機器人能組合成完整的智能巡檢服務機器人、智能導覽服務機器人、智能配送服務機器人;提供滿足此功能的實物照片;
(6)具有模塊化可拆卸式圍擋,能根據場景需求組裝成開放式貨艙的送餐服務機器人,或封閉式貨艙的配送服務機器人,配送服務機器人可通過調用功能接口方式,實現人機交互控制倉門開關;提供包含此功能的系統界面截圖;
(7)結合通用服務機器人,可實現巡檢、導覽、配送功能;
(8)可通過自檢程序對機器人的硬件狀態進行檢測。
4 智能分揀模塊 一、智能分揀模塊總體要求
智能分揀模塊具備高準確性的分揀能力,能夠準確地將貨物分揀到指定的位置,減少分揀錯誤和誤差。同時,智能分揀模塊能適應多種分揀場景需求,包括不同種類的貨物、不同的分揀方式、不同的包裝形態等,以實現靈活的分揀作業。
二、智能分揀模塊主要設備技術參數
(1)供電電壓12V;
(2)負載650g;
(3)4相步進電機;
(4)三路步進電機驅動板;
(5) 64位的四核處理器;
(6)串口通信;
(7)5V吸泵模塊;
(8)USB廣角攝像頭;
(9)具有拆卸式ROS-WH控制接口,能實現信號、電源等模塊化傳輸;
▲(10)采用模塊化設計,和通用服務機器人能組合成分揀服務機器人;提供滿足此功能的實物照片;
(11)可通過自檢程序對分揀機器人的硬件狀態進行檢測。
5 智能物聯網模塊 一、智能物聯網模塊總體要求
智能物聯網模塊具備高準確性和快速響應的能力,能夠準確地識別不同的命令并即刻執行,待機時間長。同時,智能物聯網模塊能夠快捷地添加或刪減物聯網設備。根據不同的場景需求及展示需求,完成場景設備部署,以實現靈活的配置需求。
二、智能燈光系統
(1)MCU性能不低于STM32F103C8T6;
(2)支持通用串行總線、CAN,不少于7個定時器,不少于2個ADC,不少于1路ADC, 不少于1路PWM接口;
(3)電源:12V;
(4)發光溫度不高于40攝氏度,重量不大于0.4kg;
▲(5)采用MQTT網絡通信協議,支持服務器端訂閱信息;提供滿足此功能的截圖證明;
(6)提供TCPROS/UDPROS控制接口,通過接口即可獲取所有設備的數據信息;
三、智能門鈴系統
(1)不低于32位ARM核心的帶64K字節閃存的微控制器;
(2)支持通用串行總線、CAN,不少于7個定時器,不少于2個ADC,不少于9個通信接口;
(3)支持定制WIFI、LORA、NB-IOT等常用的物聯網通信協議;
(4)內置集成放大電路驅動有源蜂鳴器、ESP8266 WI-FI模組,通信頻段2.4GHz、支持WPA/WPA2模式。
(5)內置Tensilica L106超低功耗32位微型MCU,MCU支持TCP、UDP、HTTP、FTP網絡通信協議。
(6)提供TCPROS/UDPROS控制接口,通過接口即可獲取所有設備的數據信息;
(7)待機功率不高于1.0mw;
(8)平均工作電流位:80mA。
四、智能窗簾系統
(1)不低于32位ARM核心的帶64K字節閃存的微控制器;
(2)支持通用串行總線、CAN,不少于7個定時器,不少于2個ADC,不少于9個通信接口;
(3)支持定制WIFI、LORA、NB-IOT等常用的物聯網通信協議;
(4)驅動電壓:4.8-7v,4.8V,轉速大于44圈/分。
(5)集成ACS712電流檢測芯片,1.2毫歐內部電阻,總輸出誤差為1.5%。
▲(6)提供MQTT網絡通信協議和TCPROS/UDPROS控制接口,通過接口即可獲取所有設備的數據信息;提供滿足此功能的截圖證明;
▲(7)支持PWM寬度脈沖調制輸的模擬控制方式,可變速位置型舵機;提供滿足此功能的截圖證明;
五、智能閘門系統
(1)不低于32位ARM核心的帶64K字節閃存的微控制器;
(2)支持通用串行總線、CAN,不少于7個定時器,不少于2個ADC,不少于9個通信接口;
(3)支持定制WIFI、LORA、NB-IOT等常用的物聯網通信協議;
(4)驅動電壓:4.8-7v,4.8V,轉速大于44圈/分。
(5)集成ACS712電流檢測芯片,1.2毫歐內部電阻,總輸出誤差為1.5%。
(6)提供MQTT網絡通信協議和TCPROS/UDPROS控制接口,通過接口即可獲取所有設備的數據信息;
(7)支持PWM寬度脈沖調制輸的模擬控制方式,可變速驅動舵機。
6 智能編程設備 智能編程設備主要提供給實訓完成編程任務,遠程調試設備等。
(1)可視化終端:不低于21.5寸;
(2)中央處理器:Intel i5或同等以上處理器;
(3)內存不低于16G 三代雙倍速率的SDRAM、時鐘頻率不低于1066MHz、數據傳輸帶寬不低于8.5GB/s、電壓不高于1.5V;
(4)硬盤:≥256GB可用空間;
(5)系統為Ubuntu 64位版本,能流暢使用相關工程軟件。
(6)主要用于編程任務的實現,以及機器人軟件的使用。
7 工具套裝
(1)掌上萬用表;
(2)內六角扳手套裝;
(3)活動扳手;
(4)斜口鉗;
(5)十字、一字螺絲批;
(6)備用螺絲;
(7)物聯網模塊備用電池;
(8)物聯網模塊電源適配器;
(9)排插。