


更多相關產品
- LGZN-SZ02L型智能制造數字孿生虛擬仿真實訓室
- LGGY-DS23型大田耕種機器人實訓裝置
- LGGY-DS22型物理除草機器人實訓裝置
- LGGY-DS21型大田作業機器人實訓裝置
- LGGY-DS20型果園噴霧機器人實訓裝置
- LGGY-DS19型果園采摘機器人實訓裝置
- LGGY-DS18型果園應用開發通用平臺實訓裝置
- LGGY-DS17型智能割草機器人實訓裝置
- LGGY-DS16型雙臂復合機器人實訓裝置
- LGGY-DS15型七自由度機械臂實訓裝置
- LGGY-DS14型六自由度機械臂套件實訓裝置
- LGGY-DS13型具身復合機器人創新設計套裝實訓裝置(增強版)
- LGGY-DS12型便攜式ROS導航機器人學習平臺實訓裝置
- LGGY-DS11型基于大模型的智慧零售平臺實訓裝置
- LGGY-DS10型農業智能車實訓裝置
- LGGY-DS09型智能服務機器人實訓裝置
- LGGY-DS08型ROS基礎教學智能車實訓裝置
- LGGY-DS07型視覺語音智能車實訓裝置
- LGGY-DS06型人形機器人實訓裝置
- LGGY-DS05型6足18自由度圓形仿生機器人實訓裝置
- LGGY-DS04型無人駕駛深度學習智能車實訓裝置
- LGGY-DS03型商服機器人-機械臂版及場地實訓裝置
- LGGY-DS02型計算機視覺平臺實訓裝置
- LGGY-DS01型智能汽車及賽道實訓裝置
- LGGY-Z08型智能制造綜合產線
- LGGY-SJ03型機器人視覺分揀螺母工作站實訓系統
- LGGY-WH05型工業機器人維護維修基礎教學工作站
- LGGY-F6A型服務機器人應用技術實訓平臺
- LGGY-K50型工業機器人應用工作站
- LGGY-R04型工業機器人一體化實訓平臺
- LGGY-R02B型智能生產線運行與維護綜合實訓裝置
- LGGY-T03A型智能制造單元系統集成應用平臺
- LGGY-W01A型工業機器人應用工作站
- LGGY-S2型工業機器人與智能視覺系統應用實驗平臺
- LG-MPS02型模塊化柔性自動化生產線實訓系統(八站)
- LGJ-IMS03型工業機器人模塊化智能生產線實訓系統
- LGJ-KY02型智能機器人智能制造綜合實操工作站
- LGJ-QBJ01型工業機器人模擬汽車領金沖壓集成制造實訓系統
- LGJ-CNC02型工業機器人智能生產流水線實訓平臺
- LGJ-ZH03型工業機器人組合式應用實訓裝置
LGGY-W01A型工業機器人應用工作站
一、設備概述
LGGY-W01A型工業機器人應用工作站屬于基礎技能培訓應用設備,以6軸機器人為中心,根據任務要求配置不同任務載體,培養學生對機器人基礎知識的認知。任務模型的開發融入了趣味性與娛樂性,可以增加學員的學習興趣,通過不斷的重復訓練,強化學員對基本的點示教、直線、曲線等運動足跡的了解與掌握,學習精確點的定位及機器人運動路線選擇優化;使學生對機器人應用技術有初步了解與掌握。
LGGY-W01A型工業機器人應用工作站任務載體采用模塊化設計,具備獨立性、兼容性、可移植性等特點;并預留了擴展與升級的接口,根據市場需求進行不斷的開發升級或者學校用戶自行創新設計新的功能模塊。
二、技術參數
1、工作電源:單相三線220V±5% 50HZ
2、安全保護:漏電保護,過流保護,短路保護
3、額定功率:≤2KW
4、環境溫度:-10~50℃
5、相對溫度:≤85%
6、外形尺寸:3000mm×3500mm×1200mm
三、配置及參數
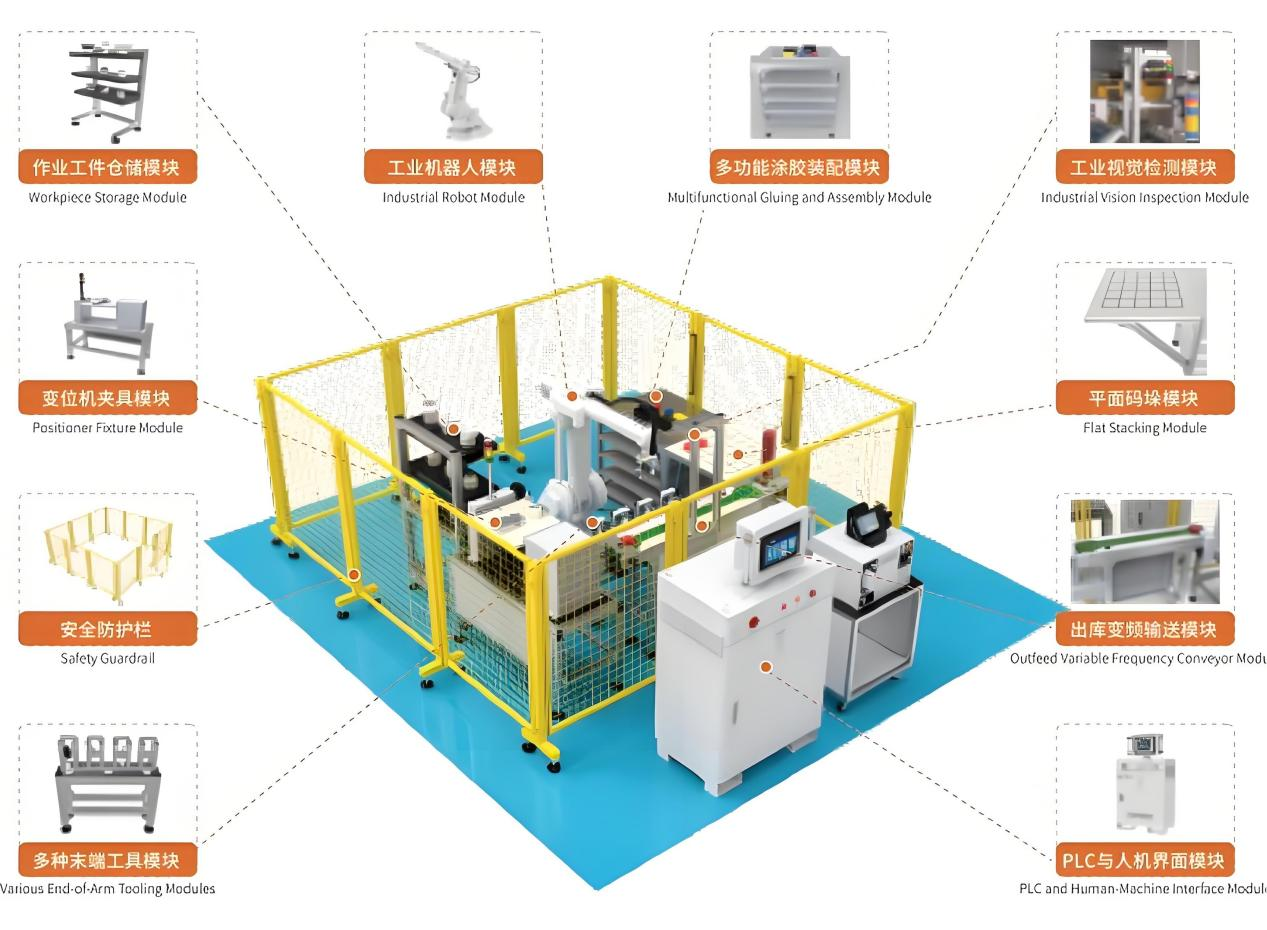
LGGY-W01A型工業機器人應用工作站主要由六軸工業機器人及底座、實訓平臺、電氣控制PLC與人機界面模塊、軌跡訓練模塊、工件裝配模塊、涂膠裝配模塊、平面碼垛模塊、圖塊搬運模型、多種末端工具模塊、工業視覺檢測模塊、安全護欄、及耗材包組成。
1、六軸工業機器人及底座:
(1)機器人本體參數
1) 自由度:6自由度
2)有效負載:5kg
3) 重復定位精度:±0.05mm
4) 本體重量:225kg
5) 最遠到達距離:1.44米
技術參數:
|
型號
|
IRB1410
|
|
|
品牌
|
ABB
|
|
|
負載能力
|
5Kg
|
|
|
控制軸
|
6軸
|
|
|
重復定位精度
|
0.02mm
|
|
|
最大動作范圍
|
J1軸
|
+170°/-170°
|
|
J2軸
|
+70°/-70°
|
|
|
J3軸
|
+70°/- 65°
|
|
|
J4軸
|
+150°/ -150°
|
|
|
J5軸
|
+115°/-115°
|
|
|
J6軸
|
+300°/-300°
|
|
|
最大動作速度
|
J1軸
|
120°/s
|
|
J2軸
|
120°/s
|
|
|
J3軸
|
120°/s
|
|
|
J4軸
|
280°/s
|
|
|
J5軸
|
280°/s
|
|
|
J6軸
|
280°/s
|
|
|
工作半徑
|
1440 mm
|
|
|
環境溫度(運行中)
|
+5°C(41°F)至 +45°C(122°F)
|
|
|
安裝方式
|
落地式
|
|
|
防護等級
|
IP54
|
|
|
本體重量
|
225Kg
|
|
|
供電電源
|
200-600 V,50/60 Hz
|
|

ABB工業機器人(IRB1410)
(2)OmniCore E10控制器:
1)緊湊型工業機器人控制柜,與配套的工業機器人本體配套;
2)控制硬件:多處理器系統大容量閃存、 UPS備份電源(≥20S);
3)控制軟件:軟件出廠預裝;
4)額定功率:≥3KVA(變壓器容量);
5)電源輸入:200V/230V 50-60Hz
6)尺寸:445*340*105mm
7)重量:12kg
8)防護等級:IP20
(3)FlexPendant示教器
1)重量:1kg
2)支持:彩色觸摸屏、操縱桿,緊急停、支持慣用左/右手切換,支持U盤、熱插拔、恢復程序,支持USB儲存器,帶時間標記登錄,支持遠程服務。
2、實訓平臺:平臺支撐板采用2mm厚鋼材經過機械加工折彎成型,表面噴涂處理;臺面采用520×266×15mm厚鋼板加工而成,表面鍍鉻處理,間隔40×40mm開M4螺紋通孔,用于安裝不同任務模型;并在一側安裝電氣接口盒,提供一個急停按鈕用于緊急情況下使用,6位按壓式端子,使用于任務模型訓練的輸入/輸出接線,方便快捷,一路氣路輸出口及氣壓調節控制,可對訓練提供需要的氣源。
3、電氣控制PLC與人機界面模塊:
(1)觸摸屏:≥7英寸;液晶顯示屏分辨率:≥800×480;組態:嵌入式組態;提供與PLC通訊相配套的端口線和工控機連接的端口線。
(2)PLC:S7-1200 CPU1214C 用戶存儲器 :75 KB 工作存儲器/4 MB 負載存儲器,可用 SD 卡擴展/10 KB 保持性存儲器;板載數字 I/O :14 點輸入/10 點輸出;板載模擬 I/O: 2 路輸入;過程映像大小: 1024 字節輸入(I)/1024 字節輸出(Q);位存儲器(M): 8192 個字節;臨時(局部)存儲器• 16 KB 用于啟動和程序循環(包括相關的 FB 和 FC)
4、出庫變頻輸模塊::由井式送料模塊、輸送帶模塊、變頻器等組成,配置可移動底板。將工件從送料模塊送出到輸送帶運行至末端由機器人夾取搬運至裝配固定氣缸上進行裝配操作。可實現送料、檢測、運輸、搬運、裝配等實訓操作。井式送料模塊有雙軸氣缸1只、電磁閥1個、磁開關1個、光纖傳感器1個。
5、軌跡訓練模型:不銹鋼加工制造,通過在平面、曲面上蝕刻不同圖形規則的圖案(直線、圓形、三角形、五角星螺旋形等線條),以筆形繪圖夾具描繪圖形,訓練對機器人基本的點示教,直線、曲線運動足跡的掌握;
6、工件裝配模型:以一個固定在操作臺工件為“主體工件”;機器人通過抓手或吸盤拾取“裝配工件”并把“裝配工件”精確裝配到“主體工件”內;訓練對機器人精確定位及抓手吸盤夾具的學習。
7、涂膠裝配模塊:涂膠機、模型、工件板分別固定到操作臺上;機器人通過吸盤夾具拾取工件板上工件;并對模型進行模擬涂膠,完成后把工件裝配到模型上;練習對機器人點的示教、機器人運動軌跡選擇及與涂膠機的配合。
8、平面碼垛模型:鋁材加工氧化的物料擺放底板和碼垛底板固定到操作臺;根據要求物料塊被擺放到擺放底板上,機器人通過吸盤夾具按要求拾取物料塊進行碼垛任務;物料塊有長方形和正方形兩種,操作者可根據需要選擇擺放;可根據需要自由組合碼垛出多種形狀; 練習對機器人碼垛、陣列的理解并快速編程示教的應用技能。
9、工業視覺檢測模塊:主要是配合工業機器人做智能檢測工件角度缺陷及自動對位等以及工業機器人視覺學習開發使用;工業相機,要求如下:像素:≥130W像素; 分辨率:≥1280×960; 像素尺寸:≥3.75μm× 3.75μm; 光譜:彩色; 支持自定義AOI,降低分辨率、f≥16mm F1.4:12毫米工業鏡頭,百萬像素相機; 配套同軸光源,光源大小≥80mm×80mm;準環形光源,直徑≥70mm,照射角度≥90度,帶模擬控制器;配套同軸光源及光源控制器:發光窗口≥50mm*50mm含調光控制電源;機器視覺兼視覺開發環境。
10、變位機夾具模塊:夾具固定工件,并由伺服控制變位機與機器人配合進行位置切換,完成模擬焊接實訓。模塊包括伺服電機1個、伺服驅動器1個、并配置標準安裝機構,移動式底板,標準電氣接口。
10、倉儲模塊:倉位數量:≥3列3層9個;倉位承重:≥2Kg;倉位尺寸:≥100mm×70mm×80mm;外形尺寸:≥350mm×180mm×450mm;工件種類:≥3種9個;帶傳感器,能自動識別倉儲情況。
11、多種末端工具模塊:由4種夾具組成,配合機器人使用作搬運、涂膠、焊接、碼垛等用途。配置快換公頭1個、快換母頭4個、搬運夾具2套、涂膠夾具1套、焊接工具1套、電磁閥3個,并標準固定機構,移動式底板。能對多種物料進行處理,學員可根據要求選擇一種方式或兩種方式同時使用,滿足教學多樣性及自主選擇性。
12、安全護欄:用來防止機器人在自動運行過程中由于人為的進入導致的安全事故主;立柱用≥50×50×t5 mm,黃色烤漆,可拆裝,圍欄高度≥1.2m; 立柱之間用網格鋼絲搭接,灰色烤漆網格,帶安全帽支架;設有急停按鈕和安全插銷開關;設置安全門,當需要檢修系統時,人員可通過安全門進入機器人動作區域,此時安全門上的安全開關會被斷開,禁止機器人的自動啟動,保證人身安全。表面光潔無毛刺,規格:≥3000×3000×1200mm。
四、教學系統及軟件資源要求
(一)智能制造生產線虛擬仿真系統軟件
(二)數字孿生技術實訓系統
(三)云智能實驗室安全管理系統
(四)工業自動化控制實訓系統
(五)教學課件資源
1、工業機器人課程資源
2、PLC編程教學課件資源
五、實訓項目
1、工業機器人的基本認識
2、工業機器人示教器運動操作
3、工業機器人的點位示教
4、工業機器人基本參數設置
5、工業機器人基本運動指示學習
6、工業機器人基于示教器的程序編輯
7、工業機器人IO控制應用
8、工業機器人基本接線方法
9、軌跡運行編程與示教
10、平面圓形描圖任務編程與示教
11、平面矩形描圖任務編程與示教
12、曲面圓形描圖任務編程與示教
13、曲面矩形描圖任務編程與示教
14、固定位置搬運編程與示教
15、平面位置搬運裝配編程與示教
16、斜面位置搬運裝配編程與示教
17、平面矩陣立體碼垛編程與示教
18、模型涂膠裝配編程與示教
19、視覺檢測的編程與示教
20、固定位置搬運編程與示教
21、工業機器人與抓手夾具配合是應用
22、自動倉儲編程與示教
23、工業機器人與快換配合是應用
24、伺服電機及變位機的編程與示教
25、傳送帶的變頻調速編程與示教