更多相關產品
- LGH-IRW04型 工業(yè)機器人操作調整工技能鑒定平臺
- LGH-JR05Z型 工業(yè)機器人視覺裝配實訓平臺
- LGH-JR605Z型 工業(yè)機器人上下料技能實訓平臺
- LGH-JR12C型 工業(yè)機器人電氣系統(tǒng)拆裝實訓平臺
- LGH-LS01型 工業(yè)機器人理實一體化教學系統(tǒng)
- LGH-MES40型 工業(yè)4.0生產線實訓系統(tǒng)
- LGH-DK01型 工業(yè)機器人雕刻實訓平臺
- LGH-HJ12型 工業(yè)機器人焊接實訓平臺
- LGH-MP12型 工業(yè)機器人磨拋實訓平臺
- LGL-PT06型 工業(yè)機器人噴涂實操工作站
- LGL-CZ06型 工業(yè)機器人機械拆裝及電氣拆裝平臺
- LGL-MD06型 工業(yè)機器人碼垛實操工作站
- LGL-DM06型 工業(yè)機器人打磨去毛刺實操工作站
- LGL-HJ06型 工業(yè)機器人焊接實操工作站
- LGL-IR03型 工業(yè)機器人綜合實訓平臺
- LGL-ZS01型 綜合設備工業(yè)機器人工作站
- LG-CY403型 高防護工業(yè)機器人
- LG-CY420型 沖壓工業(yè)機器人
- LG-CY415型 四軸工業(yè)機器人
- LG-CY410A型 沖壓工業(yè)機器人
- LG-HJ605型 焊接工業(yè)機器人
- LG-DM630型 打磨工業(yè)機器人
- LG-DM612型 打磨工業(yè)機器人
- LG-ZN6150型 工業(yè)機器人
- LG-ZN680型 工業(yè)機器人
- LG-ZN650L型 工業(yè)機器人
- LG-ZN630型 工業(yè)機器人
- LG-ZN620L型 工業(yè)機器人
- LG-ZN612型 工業(yè)機器人
- LG-ZN605型 工業(yè)機器人
- LG-ZN603型 小型六軸工業(yè)機器人
- LGL-406型 SCARA工業(yè)機器人
- LGL-608H型 六軸工業(yè)機器人
- LGL-608型 工業(yè)機器人
- LGL-607/607L型 工業(yè)機器人
- LGL-604型 工業(yè)機器人
- LGL-620型 六軸工業(yè)機器人
- LG-SX5110型 碼垛工業(yè)機器人(5軸)
- LG-SX616型 工業(yè)機器人(機床高防護版)
- LG-SX610型 六軸工業(yè)機器人
LG-IRH02型 焊接工業(yè)機器人實訓系統(tǒng)
一、LG-IRH02型 焊接工業(yè)機器人實訓系統(tǒng)功能目標
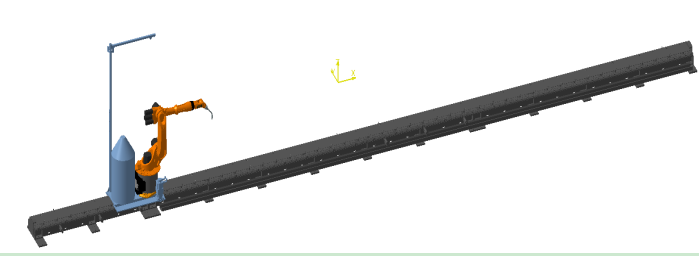
1、將機器人、送絲桶、送絲機及清槍減絲機構安裝在導軌上,控制柜和焊接電源集成于一個吊籃內。2、機器人焊接系統(tǒng)執(zhí)行焊接任務時,首先將機器人及導軌底座整體吊裝至焊縫一側,同時將另一段導軌底座吊裝,兩段導軌底座采用螺栓連接,使機器人行走距離達到13m。導軌底座與焊縫平行并保持一定距離,通過螺栓調節(jié)導軌底座的水平度,利用眼板將導軌底座固定。
3、將控制柜和焊接電源所在的吊籃吊裝至方便工作人員操作的位置。連接機器人、控制柜和焊接電源的控制電纜。
4、操作人員通過示教盒使機器人移動至焊縫起始點附近,調用通過離線編程軟件編寫的軌跡預掃命令,機器人連同3D激光器對焊縫進行預掃描,記錄焊縫的實際坐標位置。
5、焊縫預掃描結束,機器人回到焊縫起始點附近,調用通過離線編程軟件編寫的焊接命令,機器人對起始點自動尋位,焊接開始,通過電弧跟蹤以及3D激光器的在線實時跟蹤功能,保證焊縫的焊接質量。由于工件較厚、焊縫較長,選用額定電流≥500A的水冷焊接電源及水冷焊槍保證焊機工作的連續(xù)性。在機器人末端配置碰撞傳感器,保護3D激光器及焊槍。
6、焊接時,空壓機工作,為清槍減絲機構提供壓縮空氣。第一道焊接結束,機器人自動清槍減絲,為工件多層多道焊的下道焊接做準備。
7、為保證焊接作業(yè)環(huán)境的安全,實驗室配備綜合報警裝置,實現對實驗室漏水、漏電、火災等危險狀態(tài)的及時報警。
二、系統(tǒng)功能要求
1、機器人系統(tǒng):具有6自由度、支持外部擴展軸,較大的水平動作半徑以滿足不同類型焊縫的焊接;具備防碰撞功能;控制柜具有自動控制、檢測、保護、報警等功能,具備實現多層多道焊的軟硬件。
2、焊接系統(tǒng):水冷焊接電源電流*高達到500A、額定暫載率≥60%,支持CO2/MAG/MIG焊接;送絲機構與焊接電源配套;防碰撞水冷焊槍;自動清槍剪絲站;控制柜和焊接電源需集成在一起,以便于整體吊裝。
3、跟蹤系統(tǒng):具備激光在線/離線3D跟蹤功能;具備自動尋位、電弧跟蹤功能。
4、行走系統(tǒng):滿足機器人行走距離13m;導軌底座需參考我院提供的基本樣式分為兩段制作,并滿足在鋼結構上快速定位的需求;兩段導軌底座能夠實現拼接,并保證機器人的正常行走;導軌底座還需設置吊裝眼板,保證當機器人固定在導軌底座上時的整體結構強度;供應商需提供焊接機器人靜置、行走以及擺動焊接狀態(tài)下的導軌底座應力應變有限元分析報告。
5、保障系統(tǒng):配備空壓機為清槍機構提供壓縮空氣,安裝實驗室綜合報警裝置,實現對實驗室漏水、漏電、火災等危險狀態(tài)的及時報警。
三、設備技術參數要求
| 系統(tǒng)名稱 | 要求 |
| 機器人系統(tǒng) |
含機器人本體、控制柜、示教盒、控制電纜等。 機器人本體:6軸,有效負荷≥6kg,重復精確度±0.08mm范圍內,機器人*大動作半徑范圍在水平方向≥1900mm,重量≤300kg;整個機器人系統(tǒng)內置碰撞傳感器,出現碰撞后立刻停止工作。 控制柜:具有自動控制、檢測、保護、報警等功能;具備多層多道焊軟件。 示教盒:菜單式中英文雙語。 控制電纜:長度≥20m。 |
| 焊接系統(tǒng) |
含焊接電源、送絲機、焊槍、清槍剪絲站等裝置。 焊接電源:進口水冷焊接電源一套,支持CO2/MIG/MAG焊接,*大電流500A,額定暫載率≥60%。 送絲機:與焊接電源配套,性能穩(wěn)定。 焊槍:防碰撞水冷焊槍。 清槍剪絲站:自動清槍、剪絲。 |
| 跟蹤系統(tǒng) |
含3D激光器、電弧跟蹤、自動尋位等裝置。 3D激光器:激光器與機器人集成,具有焊接在線跟蹤、離線焊縫軌跡識別功能; 電弧跟蹤:具有電弧跟蹤功能。 自動尋位:具有起始點尋位功能。 |
| 保障系統(tǒng) |
含空壓機、綜合報警等裝置。 空壓機:空壓機為清槍機構提供壓縮空氣。 綜合報警裝置:安裝實驗室綜合報警裝置,實現對實驗室漏水、漏電、火災等危險狀態(tài)的及時報警。 |
| 行走系統(tǒng) |
含底座、導軌等裝置。 底座:至少包含一個擴展軸,含伺服電機和減速機;底座上預留送絲桶安裝平臺。 導軌:滿足機器人行走距離13m;導軌底座需參考我院提供的基本樣式分為兩段制作,并滿足在鋼結構上快速定位的需求;兩段導軌底座能夠實現拼接,并保證機器人的正常行走;導軌底座還需設置吊裝眼板,保證當機器人固定在導軌底座上時的整體結構強度;供應商需提供焊接機器人靜置、行走以及擺動焊接狀態(tài)下的導軌底座應力應變有限元分析報告。 |
| 售后服務 |
提供運輸、安裝調試、人員培訓等服務。 提供不少于2人的焊接機器人操作及離線編程軟件培訓,每人培訓學時≥80小時,并提供相關培訓資料; 設備保修期限≥1年(從安裝調試正常使用后開始計算)。 |
| 系統(tǒng)名稱 | 主要設備 | 品牌 | 型號 | 參數 | 數量 |
| 機器人系統(tǒng) | 機器人本體 | KUKA | KR 16L6-2 | 負載6KG;*大工作范圍1911mm;軸數:6;重復定位精度:±0.05mm; | 1套 |
| 控制柜 | KUKA | KRC4 |
多層多道焊軟件包:KUKA.Multilayer; 與3D傳感器配合實現焊接在線跟蹤、離線焊縫軌跡識別功能的軟件包:KUKA.seamtech.finding以及KUKA.seamtech.tracking |
1套 | |
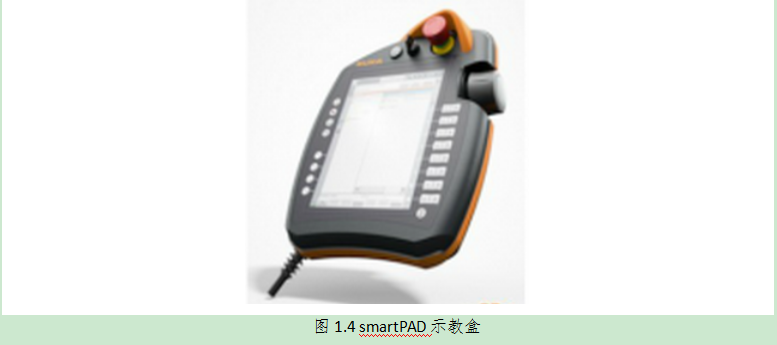
| 示教盒 | KUKA | smartPAD | 配合庫卡機器人使用 | 1套 | |
| 控制電纜 | KUKA | 180184 | ≥20米 | 1套 | |
| 機器人離線編程軟件 | KUKA | SIM PRO | 離線仿真模擬 | 1套 | |
| 防碰撞傳感器 | TBI | KS-2 | 外置式;全機械式;彈簧支撐;*大扭曲角度:10°; | 1套 | |
| 焊接系統(tǒng) | 焊接電源 | EWM | Phoenix 551 | 數字化逆變,焊接電流5-550A,暫載率550A/60%,重量125kg | 1套 |
| 送絲裝置 | EWM | 配套 | 自動送絲 | 1套 | |
| 焊槍 | 賓采爾 | ABIROB W500 | 額定電流500A | 1套 | |
| 清槍剪絲機構 | TBI | BRG-2000D | 自動清槍、剪絲 | 1套 | |
| 水冷裝置 | 國產 | 國內配套 | 滿足水冷要求 | 1套 | |
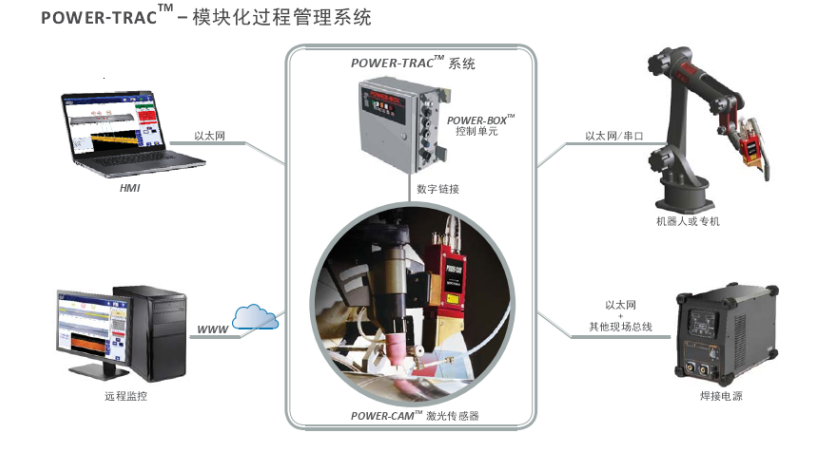
| 跟蹤系統(tǒng) | 3D激光器 | SERVO-ROBOT | POWER-TRAC | 配備POWER-CAM傳感器,含高級接頭處理軟件模塊,Trac-3D軌跡生成模塊,具備焊接在線跟蹤、離線焊縫軌跡識別功能;用于Power Cam激光傳感器的可替換保護鏡片25片; | 1套 |
| 自動尋位 | KUKA | Touchsense | 軟件:具備自動尋位功能 | 1套 | |
| 電弧跟蹤 | KUKA | Arcsense | 軟件:具備電弧跟蹤功能 | 1套 | |
| 保障系統(tǒng) | 空壓機 | 飛豹 | FBV-0.17-8 | 排氣壓力:0.8MPa;功率:1.5KW;排氣量:0.17m3/min | 1套 |
| 綜合報警裝置 | 斯必得 | SPD-T58GSM | 對實驗室漏水、停電、火災等危險狀態(tài)的及時報警 | 1套 | |
| 行走系統(tǒng) | 伺服電機 | 安川 | 外軸配套 | 7系列,位置控制,AC供電≥1000W | 1套 |
| 導軌底座 | 隆深 | LS-DG-013 | 總長13米,(6.5+6.5或者6+7),參考江蘇科技大學提供的形式,工作或吊裝時滿足強度要求;導軌底座上設置吊裝眼板,并配置用于導軌底座和機器人吊裝的吊籠;提供用于裝載焊接電源和控制柜的吊籃,滿足移動和吊裝的功能要求。 | 1套 | |
| 減速機 | 隆深 | 外軸配套 | 配合安川伺機使用 | 1套 |
五、機器人系統(tǒng)設備介紹
機器人系統(tǒng)主要由機器人本體、控制柜、示教盒、控制電纜等組成。機器人實訓平臺")
| 型號 | 負荷 | 軸數 | *大作用范圍 | 重復精確度 | 重量 | 安裝位置 |
| KR 16 L6-2 | 6kg | 6 | 1911mm | ±0.05mm | 240kg | 地面、天花板 |
2、KR C4功能特征:
(1)計劃、操作和維護更簡單
(2)繼續(xù)采用歷經驗證的基于計算機的控制技術
(3)通過繼續(xù)采用已有標準實現快速和簡捷的操作
(4)擴展的指令集便于更具用戶友好性的軌跡編程
(5)與現有的KR C2程序高度兼容
(6)安全控制、機器人控制、邏輯控制、運動控制和工藝流程控制集成于一套控制系統(tǒng)中
(7)專用控制模塊之間能進行實時通信
(8)通過中央基礎服務系統(tǒng)實現了*大化的數據一致性
(9)無縫集成的針對全新應用領域的安全技術
(10)集成軟件防火墻,網絡更加安全
(11)創(chuàng)新的軟件功能,能源效率得以*優(yōu)化
(12)適合未來發(fā)展、無專用硬件的技術平臺
(13)多核處理器支持,性能更具可升級性
(14)利用千兆以太網的快速通信
(15)一體化集成存儲卡,儲存重要系統(tǒng)數據
(16)專為380-480VAC設計
(17)優(yōu)化能源效率的全新風扇設計
(18)冷卻裝置無需保養(yǎng)且不帶濾氈
(19)在*小的空間內實現*大化的性能
(20)*大化的可用性
3、smartPAD功能特征:
smartPAD觸摸屏、圖形輔助、靈活互動。機器人的功能越強大,直觀感知式機器人操作界面就越重要。新型KUKA smartPAD在超大高清無反射觸摸屏上以*佳的效果顯示出如何直觀地操控機器人。智能交互式對話窗口向用戶清晰地展示各項流程。在任何時刻都會為用戶提供其在那一時刻正好需要的操作元件。其目的是將用戶的注意力吸引到*重要的因素上,以便其能夠直觀、簡單、快速并有效地工作。真正實現全面智能。
(2)通過單獨的運行鍵直接控制八根軸/附加軸,無需來回切換
(3)使用6D鼠標進行高效編程,并且觸控板上帶有基于人機工程學設計的鍵盤
(4)堅定不移地繼續(xù)發(fā)展了庫卡久經考驗的操作和編程方案
(5)無培訓成本
(6)可直接在smartPAD 上儲存和讀取配置
(7)熱插拔功能。如果不需要使用smartPAD,可以直接拔掉
(8)工作期間,高清、超大、防反射的顯示屏可以保護眼睛
六、焊接系統(tǒng)設備介紹
焊接裝置主要由焊接電源、焊槍、送絲機構、清槍剪絲機構、防碰撞傳感器、水冷裝置等組成,焊接裝置服務于焊接機器人,兩者之間通過總線進行通訊,可選配以太網、InterBus、Profibus、DeviceNet等主流通訊方式。焊接機器人與清槍剪絲機構之間通過I/O直接通訊,可實現清槍、剪絲流程的自動化。
1、德國EWM Phoenix 551 Puls逆變分體式焊接電源應用領域:
(1)非合金鋼、低合金鋼、高合金鋼、鋁合金、銅及銅合金、特殊金屬。
(2)實芯和藥芯焊絲(0.8-2.4mm),鈦型和堿性焊條。
(3)化學和食品行業(yè)、機械制造、車輛制造、管道建設、容器、高壓容器、造船業(yè)、海上作業(yè)等。
2、德國EWM Phoenix 551 Puls逆變分體式焊接電源特征:
(1)多功能直流逆變焊接電源可用于MIG/MAG脈沖焊、TIG常規(guī)焊、TIG接觸引弧和MMA。
(2)可移動,空冷或者水冷,獨立的送絲機構、可以用起重機搬移,5米的電源線。
(3)強有力的溫度控制風扇。
(4)冷卻液壓力監(jiān)測系統(tǒng)、溫度控制式水泵和冷卻風扇。
(5)PHOENIX DRIVE 4輪驅動(標配1.0+1.2mm鋼性送絲輪)37mm,配置歐式接口或Dinse接口。
(6)100%實際焊接檢驗。
3、德國EWM Phoenix 551 Puls逆變分體式焊接電源技術參數:
| 型號 | 焊接電流 | 暫載率MIG/MAG | 尺寸 | 重量 | ||||
| 40°C | 25°C | |||||||
| EWM Phoenix 551 Puls | 5A-550A |
550A/60% 420A/100% |
550A/60% 450A/100% |
1100 x 455 x 1000mm | 125kg | |||
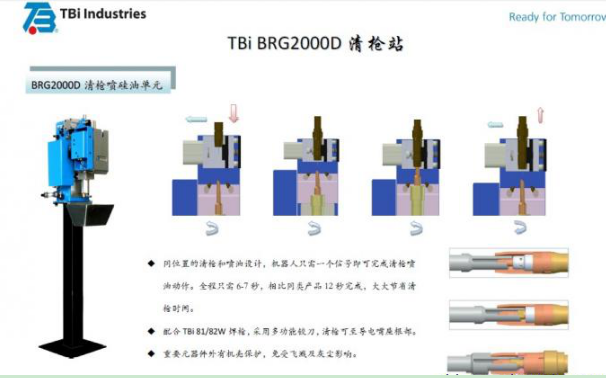
圖1.6 TBi BRG-2000D清槍站
4、德國TBi BRG-2000D清槍剪絲機構特點:(1)德國TBi BRG-2000D清槍剪絲機構同位置的清槍和噴油設計,機器人只需要一個信號就可以完成清槍噴油動作。
(2)德國TBi BRG-2000D清槍剪絲機構清槍全程只需6-7秒,相比其它同類產品12秒完成,大大節(jié)約的機器人清槍時間,更高的提高機器人的工作效率。
(3)德國TBi BRG-2000D清槍剪絲機構重要元器件都有高質量機殼保護,免受碰撞飛濺及灰塵影響。
(4)德國TBi BRG-2000D新型清槍站內置式噴油裝置由機器人通過電磁閥控制(光電感應噴油可選,一節(jié)約機器人信號)安全可靠維護。霧化防飛濺劑可以很好地到達焊槍槍頭根部,同時相對封閉的噴油倉大大減輕了設計中的油霧污染問題。
(5)德國TBi BRG-2000D剪絲裝置采用電磁閥控制,剪絲更加準確。同時新型安全防護機罩結構緊湊,確保剪掉的焊絲落入收集盒,避免二次污染。
(6)德國TBi BRG-2000D剪絲裝置和其它品牌產品相比,電氣布置非常簡單,所有控制元件都安全放置在機箱內,外露管線非常少。
5、德國TBi BRG-2000D清槍減絲機構技術參數:
| 型號 | TBi BRG2000D |
| 氣源 | 無油干燥壓縮空氣,6bar |
| 氣流量 | 大約7L/s |
| 啟動信號 | 24V DC |
| 清槍時間 | 約4-5S |
| 噴硅油裝置 | 吸油器300ml |
| 尺寸 | 34.5x24.0x16.25cm |
| 重量 | 約13kg(不含清槍站底座) |
七、跟蹤系統(tǒng)設備介紹
| 硬件 | 視覺 | 軟件 |
|
● 全套標準系統(tǒng)包括光傳感器、控制單元和軟件。 ● 非常堅固的傳感器外殼,帶有冷卻通道。 ● 壓縮空氣流噴嘴設計,保護可更換鏡片,抵抗煙塵與飛濺。 ● 保護鏡片自動探測。 ● 非常緊湊的控制單元。 |
● 焊槍軌跡實時控制。 ● 不受電弧環(huán)境干擾(飛濺、熱、煙塵、磁場、沖擊和振動)。 ● 不受環(huán)境照明條件影響。 ● 能夠在所有可焊的材料上實現跟蹤。 ● 接頭幾何尺寸真實3D激光測量。 ● 豐富的焊縫接頭數據庫可用于所有類型焊縫的跟蹤、尋位和測量。 ● 高速數字激光傳感器實現快速和可靠的接頭識別。 ● 自動接頭識別。 |
● 自適應焊接軟件包,補償接頭變化。 ● 高級接頭算法滿足各種可能的焊縫接頭。 ● 過程監(jiān)控顯示過程是否受控。 |
|
與所有的焊接工藝兼容: ● GMAW(可選適用于雙絲焊接的超級強力保護) ● GTAW(可選高頻保護) ● FCAW(可選超級強力保護) ● 激光復合焊(可選高精度激光傳感器型號) ● 激光焊(可選高精度/長離開距離的激光傳感器型號) |
||
|
可選項和附件 ● 接地故障探測器保護視覺系統(tǒng)免受因意外接觸到工件而受到焊接電流的損壞。 ● 安全互鎖I/O已集成到控制單元內部,便于機器人單元的使用。 ● 超級強力傳感器保護組件(SHDCK)是一個用于高強度焊接工藝的可選項(帶有可選的氣刀噴嘴)。 |
||
|
高級特征 ● “即插即焊”概念,通過預置標定實現簡單快速的激光傳感器更換 ● 自動激光功率控制 ● 焊接過程中自動光學調整,易于使用 ● 保護鏡片未安裝時自動關閉激光 ● 采用精密標定塊,實現傳感器與工具的自動標定 ● 可編程激光傳感器視場范圍 ● 直接數字接口連接到大多數的焊接機器人 ● 通過以太網HMI連接實現遠程診斷與服務 ● 將離線焊縫尋位、在線實時焊縫跟蹤及焊前與/或焊后檢測整合于一個系統(tǒng)中 |
||
|
獨有功能 ● 高性價比,兼有智能的解決方案 ● 系統(tǒng)組件尺寸減小,易于在機器人單元內集成 ● 可用于高速焊接過程的焊縫跟蹤,如雙絲氣保焊和激光復合焊 ● 自適應焊接模塊,應對接頭幾何尺寸變化,優(yōu)化焊縫尺寸,從而消除焊接缺陷和減少過量焊接 ● 保證焊絲精確對準焊縫,提高焊接過程穩(wěn)定性,從而減少飛濺并提高焊接質量 |
||
八、保障系統(tǒng)設備介紹
保護系統(tǒng)包含空壓機和綜合報警裝置兩部分。
| 品牌 | 型號 | 功率 | 冷卻方式 | 排氣量 | 排氣壓力 |
| 飛豹 | V-0.17-8 | 1.5KW | 風冷 | 0.17m3/min | 0.8MPa |

圖1.9 SPD-T58GSM報警裝置
2、SPD-T58GSM四大特點:(1)功能齊全
溫度監(jiān)控、濕度監(jiān)控、漏水監(jiān)控、UPS電壓監(jiān)控、空調遠程控制,空調來電自啟。
(2)結構簡單
積木式結構:一個主控器+若干傳感器,可針對自身情況對不需要的功能進行舍棄,減少不必要的花費。
(3)性能穩(wěn)定
采用進口32位工業(yè)級微控制芯片,工作穩(wěn)定可靠。
(4)安裝簡單
獨創(chuàng)積木式結構,把傳感器插入相應的控制器接口即可。設置報警溫度等操作均可通過手機鍵盤遠程設置。
九、行走系統(tǒng)設備介紹
行走系統(tǒng)長度13米,導軌底座分為兩段制作,滿足在鋼結構上快速定位的需求;兩段導軌底座能夠實現拼接,并保證機器人的正常行走;至少包含一個擴展軸,含伺服電機和減速機;底座上預留送絲桶安裝平臺,導軌底座設置吊裝眼板,當機器人固定在導軌底座上時,保證導軌底座吊裝時的整體結構強度;配置用于導軌底座和機器人吊裝的吊籠,該吊籠能夠將機器人罩住;提供用于裝載焊接電源和控制柜的吊籃,滿足移動和吊裝的功能要求。