


- LGH-IRW03型工業機器人裝調應用與維護實訓平臺
- LG-RCZ04型工業機器人維護維修實訓工作站
- LG-IRW01型工業機器人故障診斷實訓平臺
- LG-RCZ02型工業機器人拆裝綜合實訓系統
- LG-RMD05型工業機器人碼垛工作站
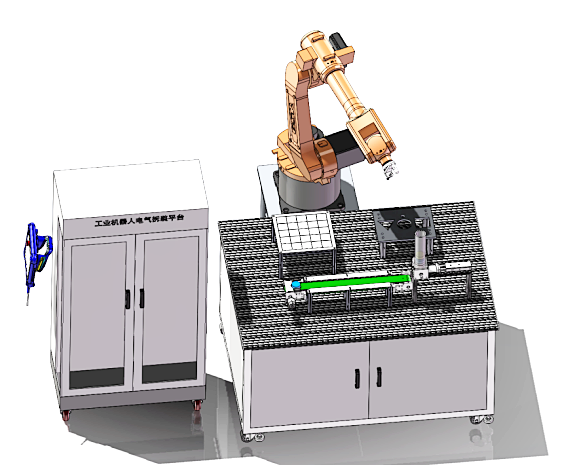
- LG-CNW01型工業機器人上下料數控車床實訓平臺
- LGL-DM06型工業機器人打磨去毛刺實操工作站
- LGL-DM06型工業機器人打磨去毛刺實操工作站
- LGJ-DM01型工業機器人打磨工作站
- LGL-MD06型工業機器人碼垛實操工作站
- LGL-PT06型工業機器人噴涂實操工作站
- LGL-HJ06型工業機器人焊接實操工作站
- LG-IRH01型機器人焊接工作站實訓平臺
- LG-IRBL02型并聯機器人視覺分揀工作站
- LGCO-BOT01型協作機器人技術及應用綜合實訓平臺
- LGJ-ZH02型工業機器人組合式應用實訓裝置
- LG-GJQS1型工業機器人與智能視覺系統應用實訓平臺
- LG-GJQS2A型工業機器人與智能視覺系統應用實訓平臺
- LGY-PCB01型工業機器人PCB異形插件工作站
- LGY-CX01型FMS工業機器人智能制造實訓平臺
- LG-IRF03型機器人RFID分揀實訓系統
- LG-IRF01型機器人光機電一體化分揀實訓系統
- LG-X102型工業機器人操作與運維工作站
- LGX-B03型工業機器人運用與維護實訓平臺
- LG-IRB03型工業機器人實訓平臺(IRB120機器人)
- LGHL-01A型工業物聯網技術應用實訓臺
- LG-RCZ02型工業機器人拆裝實訓工作站
- LGY-CX01型機器人機床上下料實操工作站
- LGL-HJ06型工業機器人焊接實操工作站
- LG-RMD05型工業機器人碼垛實操工作站
- LGJD-CZ02A型協作機器人自動生產線實訓裝置
- LGCO-BOT01型智能協作機器人技術及應用綜合實訓平臺
- LG-MPS03型智能制造模塊化生產線實訓系統
- LGY-CX06型智能制造生產線實訓系統
- LGY-PCB01型工業機器人PCB異形插件工作站
- LG-BCF01型工業機器人基礎應用實訓平臺(國產自主品牌)
- LG-ISFTP03型智能制造單元系統集成應用平臺
- LG-IRE01型工業機器人綜合實訓平臺(國產埃夫特)
- LG-IRB01A型工業機器人操作與運維實訓平臺
- LG-IGZ05型工業網絡智能控制與維護系統
LG-RCZ04型工業機器人維護維修實訓工作站
一、機械拆裝平臺
1、機械平臺主要用于機器人本體4-6軸的拆裝實訓。
2、平臺分為兩部分:一部分為機器人本體拆裝實訓區域,一部分為拆裝好定位及精度調試區域。
3、由鋁型材搭建,尺寸約:長1.2米,寬1米,高0.8米
4、配置TCP示教及軌跡兩套實訓模塊,用于拆裝后的定位及、精度調試。
5、設有內層抽屜收納。拆裝后將機器人零部件,減速機,伺服電機等放入相對應的槽中,有利于記憶機器人的結構組成,從而達到拆裝工作站的建設目的。
6、機器人本體參數指標
(1)型號:GSK RB08;
(2)有效負載:8KG;重復定位精:±0.05mm;
(3)工作半徑:1389mm;本體重量:180KG;
(4)運動范圍:J1軸:±170°、J2軸:-85°~+120°、J3軸:-155°~+75°、J4軸:±180°、J5軸:±135°、J6軸:±360°;
(5)額定速度:J1軸: 130°/s、J2軸:130°/s、J3軸:130°/s、J4軸:270°/s、J5軸:170°/s、J6軸:455°/s;
(6)減速器:RV減速器和諧波減速器;
(7)伺服電機:GSK SJTR系列高性能交流伺服電機;
1)1軸(S軸):型號:150SJTR-MZ040C(A4Y1X);驅動器型號:GS2030T-CA1;額定功率:0.84KW;極對數:5;驅動單元電壓:AC220三相或單相;額定電流:4.5A;最大轉矩:4 N.M;額定轉速:2000轉/分;最高轉速:3000轉/分;轉動慣量:1.3×10-3KG.M2;編碼器線數:絕對值式17bit P/R;失電制動器:DC 24V,12N.M,19.4W;
2)2軸(L軸):型號150SJTR-MZ080C(A4Y1X);驅動器型號:GS2050T-CA1;額定功率:1.68KW;極對數:5;驅動單元電壓:AC220三相或單相;額定電流:8.5A;最大轉矩:8 N.M;額定轉速:2000轉/分;最高轉速:2700轉/分;轉動慣量:2.9×10-3KG.M2;編碼器線數:絕對值式17bit P/R;失電制動器:DC 24V,12N.M,19.4W;
3)3軸(U軸):型號150SJTR-MZ040C(A4Y2X);驅動器型號:GS2030T-CA1;額定功率:0.84KW;極對數:5;驅動單元電壓:AC220三相或單相;額定電流:4.5A;最大轉矩:4N.M;額定轉速:2000轉/分;最高轉速:3000轉/分;轉動慣量:1.3×10-3KG.M2;編碼器線數:絕對值式17bit P/R;失電制動器:DC 24V,12N.M,19.4W;
4)4軸(R軸)及5軸(B):型號 60SJTR-MZ005E(A4Y1X);驅動器型號:GS2030T-CA1;額定功率:0.16KW;極對數:3;驅動單元電壓:AC220三相或單相;額定電流:1.45A;最大轉矩:1.5 N.M;額定轉速:3000轉/分;最高轉速:5000轉/分;轉動慣量:0.7×10-3KG.M2;編碼器線數:絕對值式17bit P/R;失電制動器:DC 24V,0.5N.M,7.2W;
5)6軸(T):型號 60SJTR-MZ003E(A4Y1X);驅動器:GS2030T-CA1;額定功率:0.1KW;極對數:3;驅動單元電壓:AC220三相或單相;額定電流:1.1A;最大轉矩:0.955 N.M;額定轉速:3000轉/分;最高轉速:5000轉/分;轉動慣量:0.05×10-3KG.M2;編碼器線數:絕對值式17bit P/R;失電制動器:DC 24V,0.5N.M,7.2W。
二、電氣拆裝實訓柜
1、電控拆裝柜主要用于 1-6 軸的驅動安裝,以及控制系統的安裝,并在柜子內部接線,形成一個開放式電柜。
2、規格尺寸:長 1.2 米,寬 0.8 米,高 1.6 米。
3、材質:鋼質烤漆。
4、工業機器人控制系統
(1)采用國內最先進的GSK-RC控制系統,機器人始終能夠根據實際載荷對加減速進行優化,盡可能縮短操作周期時間;
(2)該機器人通過內置服務信息系統(SIS)監測自身運動和載荷情況并優化服務需求,持續工作時間更長;
(3)嵌入式機器人控制器:基于ARM+DSP+FPGA硬件結構,可控制4-8軸,運算速度達到500MIPS,具有高速運動控制現場總線、以太網、RS232、RS485、CAN以及DeviceNet任一接口,可實現連續軌跡示教和在線示教,具備遠程監控和診斷功能;
(4)機器人現場總線(GSK-Link):具有高速實時特性,突破帶寬與實時性的矛盾,兼顧通訊速率和實時控制的特點,解決不同模塊間數據實時交互問題;
(5)動力學自適應辨識控制技術:綜合考慮機器人運動過程中重力、哥式力、離心力等外力干擾運用自適應辨識控制技術提高機器人的動態性能。
(6)控制系統功能特點:1、示教方法:示教再現;2、驅動方式:交流伺服電機;3、控制軸數量:6軸(可擴展至8軸);4、位置控制方式:PTP/CP;5、速度控制:TCP 恒速控制;6、坐標系統:關節坐標/直角坐標/用戶坐標/工具坐標;
(7)記憶功能:(1)介質為:Flash Memory(閃存);(2)容量為:32M;(3)內容:點,直線,圓弧,條件命令等;
(8)動作功能:線性插補、圓弧插補;
(9)編輯功能:刪除、剪貼、復制、修改、輸入、添加;
(10)外部控制輸入:數字I/O板,標準輸入/輸出各32點,可擴展、支持工路模擬量輸出(0~10V )
(11)異常檢出功能:緊急停止異常,控制時序異常,伺服異常,碼盤異常,示教盒異常,用戶操作異常,點焊異常,弧焊異常,傳感器異常;
三、示教器
1、大畫面高清晰彩屏,采用6.4英寸彩色液晶顯示器,高敏感度觸摸屏;
2、操作界面直觀,通過圖標顯示,使用戶對操作有直觀的理解;
3、使用功能鍵實現簡單操作,用戶可從庫中調出所要功能,并將其設定到各個功能鍵上;
四、電氣拆裝工具清單
1、電氣拆裝工具
(1)多功能雙層電工工具盒 330x160x165mm 1只
(2)尖嘴鉗 1只
(3)剝線鉗 1只
(4)斜口鉗 1只
(5)萬用表 1 只
(6)9件套公制球頭內六角扳手 M1.5-M10 1套
(7)電工膠布 18*10 只 1
(8)電烙鐵 50W 帶 洛 鐵 架 1只
(9)一字螺絲刀 6" 6*100) 1只
(10)一字螺絲刀 3*100 1只
(11)十字螺絲刀 6*100 1只
(12)十字螺絲刀 3*100 1只
2、機械配套工具清單
(1)機械拆裝工具 防震捶 180z 1只
(2)十字螺絲刀(小) 常規 1套
(3)一字螺絲刀(小) 常規 1套
(4)內六角扳手 1.5-10mm 1套
(5)活動扳手 常規 1個
(6)壓線鉗 普通 1把
(7)剪刀 常規 1 把
(8)尖嘴鉗 常規 1把
(9)加長扳手 2.5-4mm 1套
(10)拆卸與裝配操作指導書 1本
3、工具車
配置三層料架的工具小車,小車擺放工具,方便移動。工具車長寬高約800mm*200*800mm
五、配套教學資源
此資料包含RB08型工業機器人拆卸和裝配指導書及機器人拆裝視頻
1、功能特點:提供與實體機器人相對應的真人拆裝視頻,包含各個關節的拆裝與裝配。
2、第六關節的拆卸:法蘭盤上的外圈、柔輪和鋼輪整體部分、錐形傳動齒輪、柔輪、鋼輪、法蘭盤、中間傳動齒輪;
3、第六關節的裝配:中間傳動齒輪部分、諧波減速器的柔輪部分、法蘭盤、諧波減速器鋼輪部分、波發生器部分、諧波減速器柔輪和鋼輪部分裝配在波發生器上、固定法蘭盤的外圈;
4、第五關節的拆卸:機器人小臂外蓋、波發生器部分、諧波減速器的柔輪部分、諧波減速器的鋼輪部分;
5、第五關節的裝配:諧波減速器鋼輪、諧波減速器柔輪、諧波減速器的波發生器、諧波減速器外部固定外圈、皮帶輪;
6、第四關節的拆卸:機器人的小臂、傳動軸承、波發生器、諧波減速器的柔輪部分、動力和編碼器電纜線、傳動軸承;
7、第四關節的裝配:傳動軸承、固定傳動軸承的外圈、機器人的小臂、諧波減速器的柔輪部分、諧波減速器鋼輪部分、諧波發生器、電機外罩。