


- LG-IRH01型機器人焊接工作站實訓(xùn)平臺
- LG-IRBL02型并聯(lián)機器人視覺分揀工作站
- LGCO-BOT01型協(xié)作機器人技術(shù)及應(yīng)用綜合實訓(xùn)平臺
- LGJ-ZH02型工業(yè)機器人組合式應(yīng)用實訓(xùn)裝置
- LG-GJQS1型工業(yè)機器人與智能視覺系統(tǒng)應(yīng)用實訓(xùn)平臺
- LG-GJQS2A型工業(yè)機器人與智能視覺系統(tǒng)應(yīng)用實訓(xùn)平臺
- LGY-PCB01型工業(yè)機器人PCB異形插件工作站
- LGY-CX01型FMS工業(yè)機器人智能制造實訓(xùn)平臺
- LG-IRF03型機器人RFID分揀實訓(xùn)系統(tǒng)
- LG-IRF01型機器人光機電一體化分揀實訓(xùn)系統(tǒng)
- LG-X102型工業(yè)機器人操作與運維工作站
- LGX-B03型工業(yè)機器人運用與維護實訓(xùn)平臺
- LG-IRB03型工業(yè)機器人實訓(xùn)平臺(IRB120機器人)
- LGHL-01A型工業(yè)物聯(lián)網(wǎng)技術(shù)應(yīng)用實訓(xùn)臺
- LG-RCZ02型工業(yè)機器人拆裝實訓(xùn)工作站
- LGY-CX01型機器人機床上下料實操工作站
- LGL-HJ06型工業(yè)機器人焊接實操工作站
- LG-RMD05型工業(yè)機器人碼垛實操工作站
- LGJD-CZ02A型協(xié)作機器人自動生產(chǎn)線實訓(xùn)裝置
- LGCO-BOT01型智能協(xié)作機器人技術(shù)及應(yīng)用綜合實訓(xùn)平臺
- LG-MPS03型智能制造模塊化生產(chǎn)線實訓(xùn)系統(tǒng)
- LGY-CX06型智能制造生產(chǎn)線實訓(xùn)系統(tǒng)
- LGY-PCB01型工業(yè)機器人PCB異形插件工作站
- LG-BCF01型工業(yè)機器人基礎(chǔ)應(yīng)用實訓(xùn)平臺(國產(chǎn)自主品牌)
- LG-ISFTP03型智能制造單元系統(tǒng)集成應(yīng)用平臺
- LG-IRE01型工業(yè)機器人綜合實訓(xùn)平臺(國產(chǎn)埃夫特)
- LG-IRB01A型工業(yè)機器人操作與運維實訓(xùn)平臺
- LG-IGZ05型工業(yè)網(wǎng)絡(luò)智能控制與維護系統(tǒng)
- LGJS-300A型 電工職業(yè)技能等級認(rèn)定綜合實訓(xùn)平臺
- LG-SJ05Q型機器視覺五子棋對弈視覺工作站
- LGY-JD05B型 通用機電設(shè)備安裝與調(diào)試實訓(xùn)裝備
- LGJD-CZ02A型 機電一體化協(xié)作機器人生產(chǎn)線實訓(xùn)平臺
- LG-X101C型 1+X考證工業(yè)機器人操作與運維工作站
- LG-RCZ01A型 工業(yè)機器裝調(diào)與運維員培訓(xùn)考核系統(tǒng)
- LGY-ZD01F型自動化控制實訓(xùn)系統(tǒng)
- LGY-XH03B型工業(yè)機器人循環(huán)生產(chǎn)線實訓(xùn)裝備
- LGY-ZD05B型自動生產(chǎn)線實訓(xùn)考核裝備
- LGY-LS01A型數(shù)字孿生虛擬調(diào)試實訓(xùn)考核裝置
- LGY-ZN06型智能制造生產(chǎn)線實訓(xùn)系統(tǒng)
- LGY-Z9A型智能制造生產(chǎn)線實訓(xùn)系統(tǒng)(三臺)
LG-IRBL02型并聯(lián)機器人視覺分揀工作站
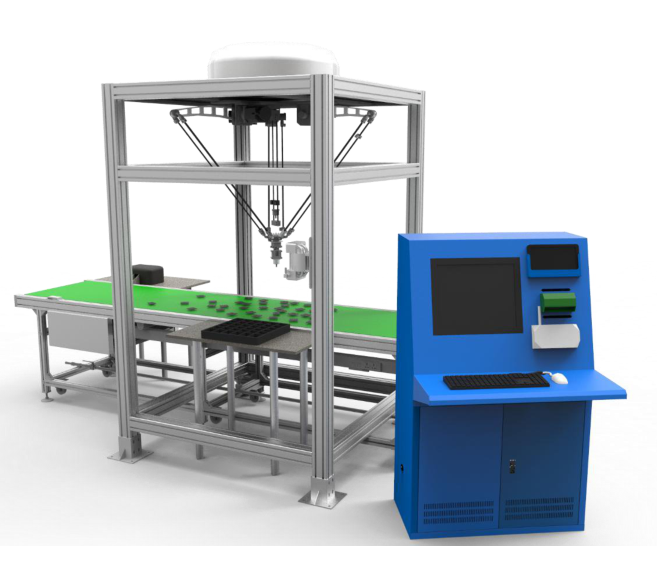
LG-IRBL02型 并聯(lián)機器人視覺分揀工作站由機器人工作臺、輸送帶、ABB四自由度并聯(lián)機器人、末端執(zhí)行器、視覺系統(tǒng)和輔助模塊組成。該裝置的主要任務(wù)是,機器人通過視覺定位抓取散亂工件進行高速高精度分揀放置整齊工作。該功能可用于來料分揀抓取裝盒等工作。
一、設(shè)備特點
1、直觀性較強:主要設(shè)備均采用直接外露的安裝形式,結(jié)構(gòu)簡單,便于學(xué)生拆裝。
2、系統(tǒng)性強,貼近實際生產(chǎn):該實訓(xùn)平臺將目前兩臺典型的高速機器人(3+1軸)和機器人視覺系統(tǒng)有機結(jié)合,同時集成傳感器、氣動元器件等知識,使學(xué)生對機電一體化設(shè)備有了更直觀的認(rèn)識。該平臺模擬了機器人實際應(yīng)用,縮短學(xué)生從教室到工業(yè)現(xiàn)場的過度和適應(yīng)時間。
3、開放性和擴展性強:該平臺還可根據(jù)自己的教學(xué)需要快捷地更換主要設(shè)備,通過現(xiàn)場總線實現(xiàn)多種設(shè)備的掛接。
4、安全性高:該實訓(xùn)平臺配備相應(yīng)的漏電、過載及短路保護,能夠確保操作者的人身安全。
二、技術(shù)參數(shù)
1、輸入電源:單相AC200V~230V(+10%-15%),50Hz;
2、工作環(huán)境:溫度0℃~45℃,相對濕度20%~90%RH(40℃);
3、工作站尺寸:2010mm×900mm×1850mm;
4、操作臺:700mm×500mm×1350mm
5、四自由度并聯(lián)機器人采用ABB IRB360-1/800并聯(lián)機器人,有效負(fù)載1KG,拾料范圍800mm。
三、設(shè)備組成及功能描述
1、輸送帶
采用兩條輸送帶,主要完成物料輸送,配合機器人對物料進行高速分揀。
2、四自由度并聯(lián)工業(yè)機器人
本工作站采用的四自由度ABB IRB360-1/800并聯(lián)機器人,有效負(fù)載1KG,拾料范圍800mm。
3、機器人末端執(zhí)行器
本工作站的機器人末端執(zhí)行器即為吸盤。末端執(zhí)行器安裝于機器人末端安裝法蘭面上,用于隨機器人對物料進行高速高精度的分揀。
4、視覺系統(tǒng)
本工作站采用歐姆龍智能視覺系統(tǒng),由視覺控制器、白色光源、視覺相機及監(jiān)視顯示器等組成。用于檢測工件的特性,如數(shù)字、顏色、形狀等,還可以對裝配效果進行實時檢測操作。通過視覺系統(tǒng)對物料的位姿進行檢測,將信號傳送給控制系統(tǒng),控制系統(tǒng)通過計算分析后指令機器人對物料進行分揀。
5、機器人工作臺
本工作站中并聯(lián)機器人、輸送帶、視覺系統(tǒng)等其他輔助模塊均集成于工作臺上,布局合理、美觀,使用方便。
6、輔助模塊
本工作站為了保證物料機器人循環(huán)分揀物料,故在輸送帶另一端配裝物料導(dǎo)向裝置。
四、配置清單
| 序號 | 名稱 | 型號 | 參數(shù) | 數(shù)量 | 備注 |
| 1 | 工作臺 | LG-IRBL02 | 2010mm×900mm×1850mm | 1套 | |
| 2 | 四軸工業(yè)機器人 | IRB360-1/800 | 有效負(fù)載1KG,拾料范圍800mm | 1套 | |
| 3 | 視覺系統(tǒng) | 歐姆龍 | 1套 | ||
| 4 | 操作臺 | 定制 | 700mm×500mm×1350mm | 1臺 | |
| 5 | 機器人末端執(zhí)行器 | 定制 | 1套 | ||
| 6 | 輸送帶 | 定制 | 2套 | ||
| 7 | 輔助模塊 | 定制 | 1套 |
五、實訓(xùn)項目
1、并聯(lián)機器人的機構(gòu)組成、工作原理、性能指標(biāo)認(rèn)識;
2、并聯(lián)機器人機械系統(tǒng)的組成;
3、并聯(lián)機器人正逆運動學(xué)分析;
4、并聯(lián)機器人控制系統(tǒng)的學(xué)習(xí);
5、PLC的學(xué)習(xí)與應(yīng)用;
6、CoDeSys軟件的了解與應(yīng)用;
7、現(xiàn)場總線的應(yīng)用;
8、機器人示教編程與再現(xiàn)控制原理與方法;
9、機器人PTP運動軌跡控制方法;
10、機器人視覺系統(tǒng)的認(rèn)識及操作;
11、機器人的視覺分揀實驗;
12、系統(tǒng)故障診斷與維護。