


更多相關產品
- LG-GSF02型兩軸伺服運動控制實訓系統
- LG-EWK02型二維運動控制實驗平臺(PLC控制)
- LG-JDQ02型機電技術綜合實訓考核平臺
- LG-SF05型伺服電機運動控制實訓裝置
- LG-JNT02型機電技術技能實訓考核裝置
- LGJ-ZK01型光機電一體化工業自動化控制應用實訓裝置
- LGJS-2型模塊式柔性自動環形生產線實驗系統(工程型)
- LGW-DJ01型電機運動控制實訓裝置
- LGJ-CC01型光機電一體化小型立體倉儲實訓臺
- LGJ-JXS02型光機電一體化桁架機械手實訓裝置
- LGJ-SXS03型光機電一體化三軸機械手控制裝置
- LGJ-FL01型變頻調速與運輸分流控制裝置
- LGJ-SH01型數字化伺服驅動與開閉環定位控制裝置
- LG-RX01型機電一體化柔性生產線加工系統(五站)
- LG-MAI01型煤礦礦山機電一體化綜合實訓考核平臺
- LGJ-JD08型自動化生產線考核實訓系統
- LG-MPS02A型模塊式柔性自動化生產線實訓系統(八站)
- LG-MPS01型網絡型模塊式柔性自動化生產線實驗系統(六站)
- LG-JDYQ01型光機電液氣一體化實訓裝置
- LG-JDYQ02型機電液氣一體化實訓裝置
- LG-RGZ03型柔性灌裝自動化生產線實訓系統
- LGPS-03型機電一體化綜合系統實訓實驗裝置
- LGJ-CZ04型拆裝式生產線組裝與調試實訓系統
- LGJD-CZ02型自動生產線拆裝與調試實訓裝置
- LG-WLE01型大型物流系統實訓裝置
- LGJS-1型現代物流倉儲自動化實驗系統
- LGJ-Q02型機電工業自動化綜合實訓裝置
- LGJ-JXS04型光機電一體化機械手實訓裝置(閉環控制)
- LGJX-82C型工業機器手實訓裝置
- LG-235A型光機電一體化高速分揀實訓系統
- LG-GSF01型運動控制綜合實訓平臺
- LGCL-01型材料分揀實訓裝置
- LGJX-82F型立體倉庫實訓裝置
- LGJX-82E型立體倉庫實訓裝置
- LGJX-82B型平面雙軸運行控制實訓裝置
- LGJX-82A型循環搬運自動控制實訓裝置
- LGJD-04型機電一體化實訓考核裝置(循環控制)
- LGJD-02型光機電一體化控制實訓裝置
- LGJD-01型光機電一體化控制實訓裝置系統
- LGY-JD06型機電綜合實訓考核平臺
LG-EWK02型二維運動控制實驗平臺(PLC控制)

一、概述
LG-EWK02型 二維運動控制實驗平臺是集運動控制卡、PLC可編程控制器、步進電機及驅動器、開關電源、XY控制平臺及運動控制軟件于一體的理想教學實驗系統。XY控制臺是一個采用滾珠絲杠傳動的模塊化十字工作臺,可以實現平面內X、Y軸方向的運動控制,用于實現目標軌跡和動作。二維運動控制實驗平臺實驗系統軟件包括基于軸的控制、基于坐標系的控制、命令編輯和運行、數控代碼編輯和運行、復雜運動軌跡控制。
LG-EWK02型 二維運動控制實驗平臺是集運動控制卡、PLC可編程控制器、步進電機及驅動器、開關電源、XY控制平臺及運動控制軟件于一體的理想教學實驗系統。XY控制臺是一個采用滾珠絲杠傳動的模塊化十字工作臺,可以實現平面內X、Y軸方向的運動控制,用于實現目標軌跡和動作。二維運動控制實驗平臺實驗系統軟件包括基于軸的控制、基于坐標系的控制、命令編輯和運行、數控代碼編輯和運行、復雜運動軌跡控制。
二、技術性能
1、定位精度:0.4mm
2、X軸有效行程:230mm;Y軸有效行程:230mm;最大運動速度:20mm/s;最大運動加速度:1g
3、輸入電源:220V±10%(50Hz)
4、工作環境:溫度-10℃~+40℃ 相對濕度<85%(25℃) 海拔<4000m
5、裝置容量:≤1.2kVA
6、外形尺寸:45cm×45cm×15cm
三、系統結構及組成
二維運動控制實驗平臺主要由步進電機控制系統和電腦桌兩部分組成,結構框圖如下圖所示:
1、定位精度:0.4mm
2、X軸有效行程:230mm;Y軸有效行程:230mm;最大運動速度:20mm/s;最大運動加速度:1g
3、輸入電源:220V±10%(50Hz)
4、工作環境:溫度-10℃~+40℃ 相對濕度<85%(25℃) 海拔<4000m
5、裝置容量:≤1.2kVA
6、外形尺寸:45cm×45cm×15cm
三、系統結構及組成
二維運動控制實驗平臺主要由步進電機控制系統和電腦桌兩部分組成,結構框圖如下圖所示:
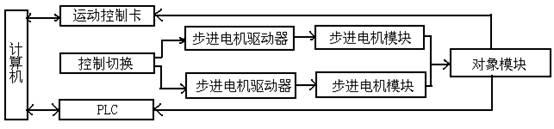
系統結構框圖
1、對象模塊
步進電機二個:采用二個2相步進電動機,分別為XY兩個方向布置,X軸運動行程為230mm,Y軸運動行程為230mm。
2、PLC一個
西門子S7-200 Smart SR40 輸入24點、輸出 16點;繼電器輸出,也可根據用戶要求配置不同型號、品牌的PLC主機。配有通訊下載電纜—個,用于連接PLC主機與上位編程軟件,實現PLC程序的上載、下載及PLC內部數據監控。
3、運動控制卡一塊
(1)32位PCI總線,即插即用
(2)所有輸入、輸出均采用光耦隔離,抗干擾性強
(3)2軸伺服/步進電機控制,每軸可獨立運動,互不影響
(4)脈沖輸出的頻率誤差小于0.1%
(5)最大脈沖輸出頻率為2MHz
(6)脈沖輸出可用單脈沖(脈沖+方向)或雙脈沖(脈沖+脈沖)方式
(7)梯形加/減速
(8)任意2軸直線插補
(9)最大插補速度1MHz
(10)運動中可以實時讀出邏輯位置、實際位置、驅動速度
(11)24路數字輸入,12路輸出
(12)每軸兩個限位輸入,可設置成無效,作為通用輸入使用
(13)支持在一個系統中使用多達16個控制卡
(14)支持DOS、WINDOWS95/98/NT/2000/XP/WINCE等操作系統
4、步進電機驅動器二個
(1)輸出電流:最大電流為2A
(2) 輸出方式:光光耦合器·開路集電極輸出
5、穩壓直流電源 一個
(1)輸出電流:最大輸出電流為5A
(2)輸出電壓:24V
(3)輸出功率:120w
6、運動控制卡接口板 一塊
為運動控制卡提供接口端子,可根據自己的需要進行相應的接線,實現接線的靈活及開放性。
7、實驗平臺信號接口板 一塊
用以實現PLC和運動控制卡與實驗平臺的信號連接,在同一時刻只能一種控制起作用。
8、電腦桌一張(選配)
9、計算機一臺(用戶自備)
(1) 用于安裝CX-Program,組態等軟件,主要完成時設備的編程及對整個設備運行情況的總體監控。
(2)硬件配置:基本配置要求P4 3.OG以上,內存至少為256M,至少有一個USB接口、一個Rs232串口和一個空閑PCI插槽。操作系統:Windows XP(專業版)+SP2。
(3)軟件及電纜:提供編程軟件CX-Program(演示版)、組態(演示版)軟件各—套,用于設備的編程和監控;提供一根通訊電纜,用于上載、下載PLC程序。
四、實驗項目
(一) 基礎實驗
1、PLC認識和操作實驗
2、PLC編程練習實驗
3、組態認識實驗
4、組態編程練習實驗
5、直線電機的認識實驗
(二)基于PLC控制的系統性實驗
6、基于PLC控制的單軸實驗
7、基于PLC控制的兩軸聯動控制實驗
8、基于PLC控制的任意路線物料搬運實驗
(三)基于運動控制卡控制的系統性實驗
9、基于運動控制卡控制的單軸實驗
10、基于運動控制卡控制的兩軸聯動實驗
11、基于運動控制卡控制的任意路線物料搬運實驗
五、運動控制卡可用以下開發工具
1、CBuilder Borland C++Bulider 6 工具開發的基本庫函數示例程序及源代碼
2、Dephi Borland Dephi 6 工具開發的基本庫函數示例程序及源代碼
3、Vb Microsoft Visual basic工具開發的基本庫函數示例程序及源代碼
4、VC Microsoft Visual C++ 工具開發的基本庫函數示例程序及源代碼
步進電機二個:采用二個2相步進電動機,分別為XY兩個方向布置,X軸運動行程為230mm,Y軸運動行程為230mm。
2、PLC一個
西門子S7-200 Smart SR40 輸入24點、輸出 16點;繼電器輸出,也可根據用戶要求配置不同型號、品牌的PLC主機。配有通訊下載電纜—個,用于連接PLC主機與上位編程軟件,實現PLC程序的上載、下載及PLC內部數據監控。
3、運動控制卡一塊
(1)32位PCI總線,即插即用
(2)所有輸入、輸出均采用光耦隔離,抗干擾性強
(3)2軸伺服/步進電機控制,每軸可獨立運動,互不影響
(4)脈沖輸出的頻率誤差小于0.1%
(5)最大脈沖輸出頻率為2MHz
(6)脈沖輸出可用單脈沖(脈沖+方向)或雙脈沖(脈沖+脈沖)方式
(7)梯形加/減速
(8)任意2軸直線插補
(9)最大插補速度1MHz
(10)運動中可以實時讀出邏輯位置、實際位置、驅動速度
(11)24路數字輸入,12路輸出
(12)每軸兩個限位輸入,可設置成無效,作為通用輸入使用
(13)支持在一個系統中使用多達16個控制卡
(14)支持DOS、WINDOWS95/98/NT/2000/XP/WINCE等操作系統
4、步進電機驅動器二個
(1)輸出電流:最大電流為2A
(2) 輸出方式:光光耦合器·開路集電極輸出
5、穩壓直流電源 一個
(1)輸出電流:最大輸出電流為5A
(2)輸出電壓:24V
(3)輸出功率:120w
6、運動控制卡接口板 一塊
為運動控制卡提供接口端子,可根據自己的需要進行相應的接線,實現接線的靈活及開放性。
7、實驗平臺信號接口板 一塊
用以實現PLC和運動控制卡與實驗平臺的信號連接,在同一時刻只能一種控制起作用。
8、電腦桌一張(選配)
9、計算機一臺(用戶自備)
(1) 用于安裝CX-Program,組態等軟件,主要完成時設備的編程及對整個設備運行情況的總體監控。
(2)硬件配置:基本配置要求P4 3.OG以上,內存至少為256M,至少有一個USB接口、一個Rs232串口和一個空閑PCI插槽。操作系統:Windows XP(專業版)+SP2。
(3)軟件及電纜:提供編程軟件CX-Program(演示版)、組態(演示版)軟件各—套,用于設備的編程和監控;提供一根通訊電纜,用于上載、下載PLC程序。
四、實驗項目
(一) 基礎實驗
1、PLC認識和操作實驗
2、PLC編程練習實驗
3、組態認識實驗
4、組態編程練習實驗
5、直線電機的認識實驗
(二)基于PLC控制的系統性實驗
6、基于PLC控制的單軸實驗
7、基于PLC控制的兩軸聯動控制實驗
8、基于PLC控制的任意路線物料搬運實驗
(三)基于運動控制卡控制的系統性實驗
9、基于運動控制卡控制的單軸實驗
10、基于運動控制卡控制的兩軸聯動實驗
11、基于運動控制卡控制的任意路線物料搬運實驗
五、運動控制卡可用以下開發工具
1、CBuilder Borland C++Bulider 6 工具開發的基本庫函數示例程序及源代碼
2、Dephi Borland Dephi 6 工具開發的基本庫函數示例程序及源代碼
3、Vb Microsoft Visual basic工具開發的基本庫函數示例程序及源代碼
4、VC Microsoft Visual C++ 工具開發的基本庫函數示例程序及源代碼