


更多相關產品
- LGWL-JT03型智能交通及監控綜合實訓平臺
- LGWL-CZ01型開放式車載控制系統
- LGWL-JT02型物聯網智慧城市交通實訓系統
- LGWL-JT01A型智能交通應用實訓系統
- LGWL-NY03型智能溫室大棚實訓系統
- LGWL-FT02型 人工智能物聯網實驗平臺
- LGWL-FTAI03型 人工智能技術開發平臺
- LGAI-BC02型 嵌入式人工智能教學科研平臺
- LGAI-RBC01型 AI偵查機器人
- LGAI-BCH04型 智能家居機器人(家居精靈)
- LGAI-BCY02型 智能移動機器人
- LGAI-BCC01型 千里眼智能車
- LGAI-BCW03型 無人機模擬飛行訓練系統
- LGAI-BC01型 嵌入式人工智能教學科研平臺
- LGAI-BCD01型 AI機器人底盤開發平臺
- LGAI-BCW01型 舞蹈人形機器人
LGWL-CZ01型開放式車載控制系統

一、產品簡介
LGWL-CZ01型 開放式車載控制系統是針對物聯網技術在汽車電子行業應用而設計的,集成全球衛星定位系統(GPS)、第四代移動通信系統(4G)、無線傳感器網絡(ZigBee)等通訊網絡,配合Android高性能嵌入式平臺、電子控制器(CAN控制器)、各種傳感器(溫濕度、壓力、一氧化碳、二氧化碳、光線、PM2.5、攝像頭等),實時感知汽車行駛方位、車速油耗、四輪胎壓、環境參數等,將車載數據傳入本地終端和遠程平臺,實現車輛系統的虛擬儀表車載數據顯示、車輛定位、行車記錄、倒車影像、障礙物自動避障等功能。系統外觀如圖所示:
LGWL-CZ01型 開放式車載控制系統是針對物聯網技術在汽車電子行業應用而設計的,集成全球衛星定位系統(GPS)、第四代移動通信系統(4G)、無線傳感器網絡(ZigBee)等通訊網絡,配合Android高性能嵌入式平臺、電子控制器(CAN控制器)、各種傳感器(溫濕度、壓力、一氧化碳、二氧化碳、光線、PM2.5、攝像頭等),實時感知汽車行駛方位、車速油耗、四輪胎壓、環境參數等,將車載數據傳入本地終端和遠程平臺,實現車輛系統的虛擬儀表車載數據顯示、車輛定位、行車記錄、倒車影像、障礙物自動避障等功能。系統外觀如圖所示:
二、功能特點
1、采用高性能嵌入式車載終端:采用Samsung S5P4418 CPU,Cortex-A9四核處理器,核心板和接口底板通過郵票方式可靠連接,主頻1.5Ghz、存儲容量8GB、內存容量1GB,集成ZigBee、WiFi/BT二合一、4G通信、GPS定位等多種通信模塊;支持LINUX和Android雙系統,一鍵切換。
2、采用CAN總線通信:配備直流電機轉動輪模擬車速、油耗和行駛方向,采用CAN總線與車載終端通信。
3、多種傳感器通信方式:包括ZigBee組網、CAN總線通信等。
4、多種長距離通信方式:包括以太網(有線)、4G、GPS等。
5、靈活多樣的傳感器,支持用戶定制:提供溫濕度、光照度、二氧化碳、胎壓、CAN車速油耗行駛方向、尾氣一氧化碳有害氣體檢測、PM2.5檢測,模擬攝像頭、聲光報警以及通風換氣設備等。
6、車載環境信息采集:定時采集溫濕度、光照度、空氣質量、二氧化碳濃度、四輪胎壓、油耗、車速、行駛方向等車載信息,為安全駕駛提供參考。
7、車載行車記錄儀:記錄車輛行駛全過程視頻圖像。
8、車載倒車影像:車輛倒車時,打開倒車攝像頭,視頻實時顯示車輛后視畫面,為車輛和周圍人員的人身安全提供保證。
9、車輛實時定位功能:依托高速嵌入式車載終端GPS定位模塊,實時上報車輛的地理信息,監控中心可隨時隨地快速獲取所有車輛位置,地圖顯示。
10、導航功能:內嵌第三方地圖API,輸入目的地,地圖實時指引目標路線。
11、語音播報功能:導航過程中,系統語音及時播報距離目的地的路況信息。道路擁堵、參數異常、聯動設置過程中,智能語音節點及時播報提示信息。
12、道路擁堵模擬:使用超聲波測距實時檢測車輛前方狀況、結合當前行駛速度,車載網關判斷出道路擁堵,地圖導航界面顯示紅色車輛擁堵標志提醒用戶前方擁堵。一旦傳感器檢測出道路暢通,網關自動取消擁堵標志。
13、車聯網功能:前方車輛發布“道路擁堵”或“道路暢通”等信號后,立即發布廣播通知,提醒后方來車道路擁堵狀況。后方車輛及時調整行駛方向。
14、遠程數據訪問:支持Web瀏覽器遠程登錄,獲取實時監測數據、車輛位置信息,曲線展示歷史數據,支持歷史數據導出功能。
1、采用高性能嵌入式車載終端:采用Samsung S5P4418 CPU,Cortex-A9四核處理器,核心板和接口底板通過郵票方式可靠連接,主頻1.5Ghz、存儲容量8GB、內存容量1GB,集成ZigBee、WiFi/BT二合一、4G通信、GPS定位等多種通信模塊;支持LINUX和Android雙系統,一鍵切換。
2、采用CAN總線通信:配備直流電機轉動輪模擬車速、油耗和行駛方向,采用CAN總線與車載終端通信。
3、多種傳感器通信方式:包括ZigBee組網、CAN總線通信等。
4、多種長距離通信方式:包括以太網(有線)、4G、GPS等。
5、靈活多樣的傳感器,支持用戶定制:提供溫濕度、光照度、二氧化碳、胎壓、CAN車速油耗行駛方向、尾氣一氧化碳有害氣體檢測、PM2.5檢測,模擬攝像頭、聲光報警以及通風換氣設備等。
6、車載環境信息采集:定時采集溫濕度、光照度、空氣質量、二氧化碳濃度、四輪胎壓、油耗、車速、行駛方向等車載信息,為安全駕駛提供參考。
7、車載行車記錄儀:記錄車輛行駛全過程視頻圖像。
8、車載倒車影像:車輛倒車時,打開倒車攝像頭,視頻實時顯示車輛后視畫面,為車輛和周圍人員的人身安全提供保證。
9、車輛實時定位功能:依托高速嵌入式車載終端GPS定位模塊,實時上報車輛的地理信息,監控中心可隨時隨地快速獲取所有車輛位置,地圖顯示。
10、導航功能:內嵌第三方地圖API,輸入目的地,地圖實時指引目標路線。
11、語音播報功能:導航過程中,系統語音及時播報距離目的地的路況信息。道路擁堵、參數異常、聯動設置過程中,智能語音節點及時播報提示信息。
12、道路擁堵模擬:使用超聲波測距實時檢測車輛前方狀況、結合當前行駛速度,車載網關判斷出道路擁堵,地圖導航界面顯示紅色車輛擁堵標志提醒用戶前方擁堵。一旦傳感器檢測出道路暢通,網關自動取消擁堵標志。
13、車聯網功能:前方車輛發布“道路擁堵”或“道路暢通”等信號后,立即發布廣播通知,提醒后方來車道路擁堵狀況。后方車輛及時調整行駛方向。
14、遠程數據訪問:支持Web瀏覽器遠程登錄,獲取實時監測數據、車輛位置信息,曲線展示歷史數據,支持歷史數據導出功能。
三、硬件結構
系統拓撲結構如圖所示:
系統拓撲結構如圖所示:
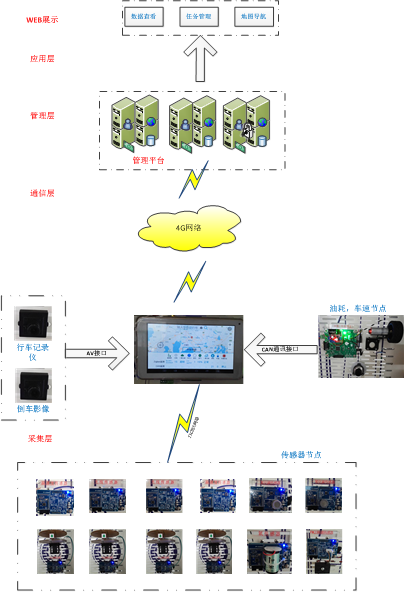
系統中部署了Zigbee傳感器、CAN總線傳感器,這些傳感器分別通過ZigBee組網、CAN總線與車載網關通信。網關可選擇使用WiFi、4G移動接入互聯網,同時帶有GPS導航定位模塊實現車輛的實時定位。
1、Zigbee傳感器:主要包括溫濕度、光照度、二氧化碳、胎壓監測、尾氣監測等節點,均采用CC2530通信模塊、傳感器模塊和接口底板的結構形式。CC2530既作為單片機檢測傳感器數據,又作為通信模塊運行zigbee組網協議和協調器進行數據通信,實現采集數據的上報和控制命令的接收執行。
2、CAN總線傳感器單元:主要包括車速、油耗、行駛方向CAN總線單元,采用STM32處理器主板、CAN通信模塊、和外圍設備的結構形式。STM32作為單片機檢測車速、油耗以及行駛方向的數據,通過CAN總線與車載網關進行數據通信,實現采集數據的上報和控制命令的接收執行。
1、Zigbee傳感器:主要包括溫濕度、光照度、二氧化碳、胎壓監測、尾氣監測等節點,均采用CC2530通信模塊、傳感器模塊和接口底板的結構形式。CC2530既作為單片機檢測傳感器數據,又作為通信模塊運行zigbee組網協議和協調器進行數據通信,實現采集數據的上報和控制命令的接收執行。
2、CAN總線傳感器單元:主要包括車速、油耗、行駛方向CAN總線單元,采用STM32處理器主板、CAN通信模塊、和外圍設備的結構形式。STM32作為單片機檢測車速、油耗以及行駛方向的數據,通過CAN總線與車載網關進行數據通信,實現采集數據的上報和控制命令的接收執行。
四、軟件資源
整個軟件系統包括智能車載網關管理軟件、智能車載WEB終端監控平臺軟件。智能車載Web終端監控平臺部署在云服務器上,提供一段時間的使用權限,只需打開瀏覽器登錄即可訪問系統。智能車載網關管理系統是車載網板的本地控制中心。
1、智能車載導航網關管理軟件:默認運行Android系統,具有系統設置、設備添加、傳感器信息、行車記錄儀、倒車影像、導航定位、道路擁堵聯網發布等功能項。系統設置主要設置CAN總線的波特率、zigbee協調器的串口號、服務器地址、傳感器上下限與執行器的聯動。設備添加主要用于向系統數據庫添加zigbee節點、CAN設備。行車記錄儀主要模擬車輛行駛過程中的視頻監控。倒車影像主要模擬車輛在倒車時啟動攝像頭進行視頻監控。系統支持導航定位,同時語音提醒道路狀況。當道路發生擁堵時,自動發布,為其他車輛提供路徑參考。
車載網關端軟件在整個智能車載中起著承上啟下的作用,是整個網板的核心,向下管理ZigBee無線傳感器網絡、CAN總線傳感器、向上接入云平臺,進行數據交互。網關采用Android軟件開發,使用串口通訊,接收ZigBee傳感器采樣數據,下發ZigBee控制命令控制設備開關;使用CAN總線接口,實時接收CAN傳感器節點上報的數據;軟件內置MQTT協議,可與WEB客戶端進行即時通訊,實時顯示數據采樣信息和設備狀態,同時通過webservice二次開發接口將數據存入云服務器數據庫,實現歷史數據存儲。
2、智能車載Web端監控系統軟件:提供瀏覽器方式訪問智能車載Web端監控軟件。Web系統后端采用Spring+mybatis+Tomcat架構,內嵌MQTT協議。只需輸URL地址,就可以登錄到web系統中,遠程查詢所有車輛的位置、所有車載傳感器的采樣數據,對各個執行設備進行遠程控制。具體包括網關管理、傳感器設備管理、聯動管理、報警記錄、歷史數據曲線顯示、車輛位置等功能。
五、配置清單
整個軟件系統包括智能車載網關管理軟件、智能車載WEB終端監控平臺軟件。智能車載Web終端監控平臺部署在云服務器上,提供一段時間的使用權限,只需打開瀏覽器登錄即可訪問系統。智能車載網關管理系統是車載網板的本地控制中心。
1、智能車載導航網關管理軟件:默認運行Android系統,具有系統設置、設備添加、傳感器信息、行車記錄儀、倒車影像、導航定位、道路擁堵聯網發布等功能項。系統設置主要設置CAN總線的波特率、zigbee協調器的串口號、服務器地址、傳感器上下限與執行器的聯動。設備添加主要用于向系統數據庫添加zigbee節點、CAN設備。行車記錄儀主要模擬車輛行駛過程中的視頻監控。倒車影像主要模擬車輛在倒車時啟動攝像頭進行視頻監控。系統支持導航定位,同時語音提醒道路狀況。當道路發生擁堵時,自動發布,為其他車輛提供路徑參考。
車載網關端軟件在整個智能車載中起著承上啟下的作用,是整個網板的核心,向下管理ZigBee無線傳感器網絡、CAN總線傳感器、向上接入云平臺,進行數據交互。網關采用Android軟件開發,使用串口通訊,接收ZigBee傳感器采樣數據,下發ZigBee控制命令控制設備開關;使用CAN總線接口,實時接收CAN傳感器節點上報的數據;軟件內置MQTT協議,可與WEB客戶端進行即時通訊,實時顯示數據采樣信息和設備狀態,同時通過webservice二次開發接口將數據存入云服務器數據庫,實現歷史數據存儲。
2、智能車載Web端監控系統軟件:提供瀏覽器方式訪問智能車載Web端監控軟件。Web系統后端采用Spring+mybatis+Tomcat架構,內嵌MQTT協議。只需輸URL地址,就可以登錄到web系統中,遠程查詢所有車輛的位置、所有車載傳感器的采樣數據,對各個執行設備進行遠程控制。具體包括網關管理、傳感器設備管理、聯動管理、報警記錄、歷史數據曲線顯示、車輛位置等功能。
五、配置清單
|
序號
|
類別
|
名稱
|
數量
|
備注
|
|
|
結構
|
落地式網孔掛板
|
1
|
|
|
|
嵌入式車載終端
|
智能網關(板載WiFi/BT模塊、7寸1024*600電容觸摸顯示屏)
|
1
|
|
|
|
網關喇叭
|
1
|
|
|
|
|
4G移動通訊模塊(安裝在A9背面)
|
1
|
含4G天線
|
|
|
|
GPS/Beidou定位模塊(安裝在A9背面)
|
1
|
含GPS天線
|
|
|
|
Zigbee通訊模塊(安裝在A9背面)
|
1
|
|
|
|
|
車載監控設備
|
Zigbee協調器
|
1
|
|
|
|
Zigbee溫濕度節點
|
1
|
|
|
|
|
ZigBee光照度節點
|
1
|
|
|
|
|
ZigBee空氣質量(PM2.5)節點
|
1
|
|
|
|
|
ZigBee胎壓監測節點
|
4
|
|
|
|
|
稱重傳感器裝置(10kg)
|
4
|
|
|
|
|
ZigBee一氧化碳節點
|
1
|
|
|
|
|
ZigBee二氧化碳節點
|
1
|
|
|
|
|
CAN車速油耗模擬節點
|
1
|
|
|
|
|
直流電機轉動輪
|
1
|
|
|
|
|
高清模擬攝像頭
|
2
|
|
|
|
|
ZigBee通風扇節點
|
1
|
|
|
|
|
ZigBee聲光控制節點
|
1
|
|
|
|
|
軟件系統
|
智能車載導航終端管理軟件
|
1
|
|
|
|
智能車載Web端監控平臺
|
1
|
外網部署
|
|
|
|
附件
|
CC2530-Debugger調試器
|
1
|
含10芯排線
|
|
|
JLink仿真器
|
1
|
含20芯排線
|
|
|
|
程序下載調試板
|
1
|
含10芯排線
|
|
|
|
方口USB數據線
|
1
|
|
|
|
|
Micro USB數據線
|
1
|
|
|
|
|
USB轉RS232轉換器
|
1
|
|
|
|
|
TF卡讀卡器
|
1
|
|
|
|
|
TF卡
|
1
|
|
六、技術參數
|
序號
|
名稱
|
詳細參數
|
|
|
整體功能要求
|
采用落地式網孔掛板,各個節點通過亞克力基板固定在車輛分解圖上。
節點可自由拆卸,自由組合,既能在網板上形成完整的車載系統,又可以獨立成為一個實驗單元。
主要包括高性能車載導航終端,傳感器節點,行車記錄儀,倒車影像儀,GPS/北斗雙模定位模塊以及4G移動通信模塊。
傳感器節點包含溫濕度、光照度、空氣質量PM2.5濃度、胎壓、尾氣CO濃度、CO2濃度、車速油耗以及行駛方向等監測節點,每個節點都是獨立的模塊。
能夠進行ZigBee、WiFi、藍牙、以太網、CAN、232、485通信。
系統采用B/S架構,提供免費云服務平臺,支持本地車載終端和WEB端進行車輛環境參數的實時監測。
具體功能應包括:
(1)車內環境參數實時監測
(2)數據查詢與告警處理
(3)歷史數據導出
(4)行車記錄儀與倒車影像監控
(5)遠程實時監控
(6)車輛實時定位
(7)車載導航與語音播報
提供各個節點或設備的電路原理圖、通信協議文檔、Zigbee組網案例、CAN通信案例、Android應用開發等實驗指導書。
|
|
|
高性能車載導航終端
|
用于管理ZigBee傳感器網絡、CAN總線傳感器,配置接入云平臺,與云平臺進行數據交互。
主要包含
采用Android軟件開發,實時處理ZigBee傳感器采樣數據;使用CAN總線接口,實時接收CAN傳感器節點上報的數據;軟件內置MQTT協議,可與WEB客戶端進行即時通訊,實時顯示數據采樣信息和設備狀態,同時通過webservice二次開發接口將數據存入云服務器數據庫,實現歷史數據存儲。
智能車載導航網關控制軟件主要功能包括:地圖定位及導航、Zigbee/CAN傳感器實時監測、參數配置、設備添加、行車記錄儀、倒車影像等。
1)核心板
內核:四核Cortex-A9處理器S5P4418,主頻可調,最大1.6GHz;
內存:1GB DDR3,帶寬32位,頻率最高800MHz;
eMMC存儲:8GB/16GB/32GB,標配8GB,滿足大容量需求;
GPU:MAIL-400,3D圖形加速;
編解碼:支持H.264、MP4、JPEG硬件編解碼;
音頻:集成REALTEAK的ALC5640,提供去底噪的MIC錄音和立體聲喇叭驅動,一路PCM可提供給MODEM和藍牙耳機;
RGB顯示:24位RGB888,最大支持1920*1080;
HDMI:符合HDMI1.4a,最大支持1920*1080;
LVDS:單通道,最大支持1920*1080;直接與LVDS屏連接,不需加任何轉換芯片;
GMAC:支持以太網絡PHY芯片,支持10/100/1000M;
觸摸屏:I2C接口電容屏,支持5點以上觸摸;
RTC:集成NXP的RTC芯片而不是用CPU自身的RTC功能,工作電流僅為0.25uA@3.3V,用戶常規40mA鈕扣電池可保存時間達15年之久。
I/O電平3.3V,符合當前IO電平,不需要進行電平轉換;
所有I/O具有中斷功能;
具有6路UART,其中UART1為五線制,符合更多應用;
核心板提供加密IC,給用戶唯一標識的串碼,便于用戶產生MAC地址和標識產品。
電源管理PMIC芯片,支持2A大電流充電支持,支持外接5V和USB5V;
采用8L HDI的盲埋工藝制造,多層GND有效地屏蔽高速信號線,減少EMI的產生。
帶有屏閉罩,在散熱和EMI和EMC方面性能出眾。
2)底板
采用4層PCB工藝,含豐富的外圍接口。
多點觸摸電容顯示屏:1個,TFT IPS LCD,分辨率1024*600;
顯示接口:標配2.0間距20P標準LVDS接口1個,板載HDMI接口個,板載LCD接口1個;
模擬攝像頭接口:1個,支持PAL和NTSC制式;
CMOS攝像頭接口:1個,支持500M像素OV5642;
數據接口:集成兩通道USB2.0 HOST USB-A座 2個,可接U盤鼠標;1路MicroUSB OTG2.0協議接口 1個;
以太網網絡:100M以太網接口1個,標準RJ45;
WIFI:SDIO接口WIFI模塊,支持802.11b/g/n;
BlueTooth:藍牙4.0支持,串口相連;
串口232:RS232 DB9 2路;
串口TTL:TTL電平UART2路,2.0間距4p連接器;
TF卡接口:1個;
SIM卡接口:1個;
MODEM:標準Minipci-E接口,支持3G和4G,與SIM卡一同使用實現電話和數據通信的功能;
按鍵:音量增減鍵,復位按鍵,電池休眠喚醒按鍵;
撥動開關:電源開關,BT與TTL UART切換開關,232/485切換開關;
音頻接口:1.5W喇叭1個,1個音頻輸出接口,1個MIC接口;
視頻接口:1路模擬高清攝像頭輸入接口,可與四通道視頻轉換模塊連接,自由切換;
LED:具有充電指示燈,MODEM工作狀態燈,電源燈,系統指示燈;
電源:5V電源輸入,過壓保護,支持鋰電池接入,可充電和電量檢測;
板載1路CAN總線、1路485總線等現場總線接口,板載1組24P排線接口,含用于I/O、I2C、SPI、A/D、PWM、UART,用于外部功能擴展。
默認板載WiFi/BT二合一通訊模塊、ZigBee通訊模塊;
可選配4G移動通信模塊、GPS定位模塊。
★支持Linux系統與Android系統一鍵切換。
3)板載WiFi/BT二合一通訊模塊
該模塊是一款低成本、低功耗、小體積、高性能的WiFi+BT4.2模塊,該模塊符合802.11b/g/n標準,內部集成SDIO接口的WiFi芯片和UART/I2S/PCM接口的低功耗藍牙4.2,具有Station Mode,SoftAP,P2P功能等。
模塊直接焊接在A9接口底板上,自帶陶瓷天線,用于無線數據收發。
WiFi性能參數:
協議標準:符合WLAN IEEE802.11 b/g/n單邊頻率;
通信速率:802.11n時,為72.2Mbps,802.11g時,為54Mbps,802.11b時,為11Mbps;
頻率范圍:2.4GHz~2.497GHz(2.4GHz ISM Band);
信道數量:2.4GHz,Ch1~Ch14;
調制技術:802.11b時,為DQPSK、DBPSK、CCK;802.11 g/n時,為OFDM /64-QAM、16-QAM、QPSK、BPSK;
通訊接口:SDIO;
藍牙性能參數:
協議標準:Bluetooth V4.2;
通信速率:1、2、3Mbps,高達4Mbps;
頻率范圍:2.4GHz~2483.5GHz;
信道數量:79路信道;
調制技術:FHSS、GFSK、DPSK、DQPSK;
通訊接口:UART/PCM;
工作電壓:3.3VDC供電;
工作溫度:-30℃~85℃;存儲溫度:-40℃~85℃;
工作濕度:10%~95%,無凝露;
4)4G移動通訊模塊
采用標準的Mini PCIe封裝,同時支持LTE,UMTS和GSM/GPRS網絡,最大上行速率為50Mbps,最大下行速率為100Mbps。
兼容現存的EDGE和GSM/GPRS網絡,確保在缺乏3G和4G網絡的偏遠地區也能正常工作。
EC20 Mini PCIe支持接收分集技術,在終端設備上安裝2個不同的蜂窩天線,從而實現優質可靠的無線連接。它通過多輸入多輸出技術(MIMO)降低誤碼率,改善通信質量。同時,EC20 Mini PCIe結合了高速無線連接與內置多星座高精度定位SPS+GLONASS接收器。
頻段:FDD LTE:B1/B3/B8,TDD LET:B38/B39/B40/B41,TDSCDMA:B34/B39,UMTS:B1/B8,GSM:900/1800MHz;
頻帶寬度:1.4/3/5/10/15/20MHz;
數據速率: LTE-FDD:下行100Mbps,上行50Mbps,LTE-TDD:下行61Mbps,上行18Mbps;DC-HSPA+:下行42Mbps,上行5.76Mbps;UMTS:下行384kbps,上行384Kbps;EDGE:下行236.8Kbps,上行236.8Kbps;GPRS:下行85.6Kbps,上行85.6Kbps;
音頻:語音解碼模式:HR,FR,EFR,AMR,AMR-WB;回聲消除,噪聲抑制;
網絡協議:內置豐富的網絡協議,TCP/UDP/PPP/FTP/HTTP/SMTP/MMS/SSL,集成多個工業標準接口;
天線:DL MIMO 2*2;
供電電壓:3.0V~3.6V,3.3V典型值;
工作溫度:-40℃~+80℃;
AT命令控制:3GPP TS27.007 以及增強型AT命令。
5)GPS定位模塊
具有高靈敏度、低功耗、小型化、小靜態漂移、高精度定位的特點;
性能參數:
22個跟蹤通道,66個捕獲通道;
頻率:GPS L1 1575.42MHz,C/A碼;
支持WAAS、EGNOS、MSAS、GAGAN;
跟蹤靈敏度:-165dBm;
捕獲靈敏度:-148dBm;
冷啟動:23s(開闊天空);溫啟動:2-3s;熱啟動:<1s;
定位精度:3m(CEP50 without SA),2.5m(SBAS);
定位精度:3s;
速度精度:0.1m/s;時間脈沖:100m/s;最大更新速率:10Hz;
數據格式:NMEA 0183,可定制;
運行限制:高度<18000m,速度<515m/s,加速度<4g;
電源:3.0~4.2V;
功耗:50mw;
VBAT:7uA;
功能接口:2個UART接口,1個SPI接口,1個USB接口;
工作溫度:-40~85℃,儲存溫度:-40~85℃;
封裝:SMD;
標準:符合RoHs;
無線類型:支持無源、有源天線;
|
|
|
ZigBee協調器
|
結構:由ZigBee通訊模塊和底板組成;
通信模塊:通過單排針與底板連接,默認采用2.4G板載天線通信;預留膠棒天線接口;可更換相同尺寸的藍牙通訊模塊;
底板:通過兩側雙排針與嵌入式網關連接,具有RS232、TTL UART、藍牙三種傳輸選擇跳線;匯聚信息既可通過TTL電平的UART接口接入嵌入式網關,也可通過RS232電平轉換芯片與DB9接口接入網關或上位機PC
底板具有1個CC2530燒寫接口,2個傳輸指示燈,3個狀態指示燈、3個功能按鍵,1個復位按鍵,1個電源撥動開關;
功能:用于建立無線ZigBee傳感器網絡,匯聚、分析傳感器信息,并與上位機進行數據交互。
射頻芯片:CC2530;
Flash容量:≧128KB;
RAM容量:8K的RAM;
數據通訊接口:RS232或TTL UART接口;
天線接口:2.4G板載天線;
協議標準:IEEE802.15.4;
協議棧:默認采用ZigBee 2007,兼容ZigBee2006,TinyOS等;
傳輸速率:無線數據傳輸速率約為20~250kbps;
通信距離:室內30~50m,室外90~200m;
工作電壓:供電電壓典型值默認DC 5V。
工作電流:<120mA;
供電方式:支持插針式供電、獨立供電兩種方式;
|
|
|
空氣溫濕度傳感器節點
|
用于檢測車內相對濕度和溫度,全量程校準,全靜態時序控制,兩線制數字格式輸出,具有自動休眠功能,體積小功耗低,測量精度高;
采用貼片型溫濕度傳感器芯片;
通訊接口:兩線制數字接口(SCL、SDA),直接與微控制器相連,響應速度快;
測量方式:請求式測量,自動休眠,超低能耗;全標定輸出,無需重新校準;
濕度測量范圍:0~100%RH;
溫度測量范圍:-40~123.8℃;
濕度測量精度:±4.5%RH;
溫度測量精度:±0.5℃;
響應時間:8s(tau63%);
低功耗: 80μW(12位測量,1次/s);
處理器型號:CC2530,8KB RAM容量,128KB Flash容量,zstack2007協議棧。
無線通信類型:ZigBee;
供電:默認DC 3.3V;
|
|
|
光照度傳感器節點
|
用于檢測室內的光照度
采用貼片型光照度傳感器芯片;
通訊接口:模擬型;線性電壓輸出2.2~VCC,接入射頻芯片的一路AD接口;
特性:內置雙敏感元接收器,可見光范圍內高度敏感,輸出電流隨照度呈線性變化;
光電流(最小):27uA,(最大):54uA;
暗電流(泄露電流):0.1uA;
處理器型號:CC2530,8KB RAM容量,128KB Flash容量,zstack2007協議棧。
無線通信類型:ZigBee;
供電:默認DC 3.3V;
|
|
|
空氣質量PM2.5濃度檢測節點
|
用于模擬檢測車輛外部空氣PM2.5濃度,給車主提供空氣質量情況。
傳感器類型:GP2Y1050AU0F
最大量程:0-999微克/立方米
最大工作電流:100mA
工作溫度:-20~50℃
串口數據輸出頻率:1次/秒
處理器型號:CC2530,8KB RAM容量,128KB Flash容量,zstack2007協議棧。
通信方式:ZigBee組網通信
節點供電:DC 5V
|
|
|
胎壓傳感器監測節點
|
采用支架式托盤結構,按壓式應變片感知壓力,模擬檢測車輛四個輪胎的氣壓,保證行車安全。
處理模塊:HX711AD(24位轉換精度)
支架直徑:10cm
外觀高度:3.5cm(含支柱)
轉換精度:24位
校準后精度:1g內
測量方式:全橋電路測量,標準總線
處理器型號:CC2530,8KB RAM容量,128KB Flash容量,zstack2007協議棧。
通信方式:ZigBee組網通信
節點供電:DC 5V
|
|
|
稱重傳感器裝置
|
承重面尺寸:130mm*95mm
承重面厚度:5mm
傳感器量程:10kg
線號線纜:紅色(傳感器電源輸入E+),綠色(傳感器電源地E-),白色(差分信號輸出S-),黑色(差分信號輸出S+)。
靈敏度:2.0mV/V
電源電壓:5V-10V
|
|
|
尾氣CO濃度節點
|
用于檢測車輛排出的尾氣中CO的濃度,提供有效數據,為降低有害氣體排放、提高燃燒率提供依據。
產品型號:MQ-7
產品類型:半導體氣體傳感器
檢測濃度:10~500ppm
預熱時間:不少于48小時
處理器型號:CC2530,8KB RAM容量,128KB Flash容量,zstack2007協議棧。
通信類型:ZigBee組網通信
節點供電:DC 5V
|
|
|
二氧化碳濃度檢測節點
|
主要用于檢測車內二氧化碳的濃度,以保證良好的車內環境。
產品類型:固體電解質氣體傳感器
標準封裝:金屬封裝
檢測氣體:二氧化碳
檢測濃度:350—10000ppmCO2
加熱電壓(VH): 6.0±0.1 VAcorDC
負載電阻(RL): 可調
加熱電阻(RH): 35Ω±3Ω(室溫)
加熱功耗(PH): 約1200mW
溫度、濕度:20℃±2℃;65%±5%RH
處理器型號:CC2530,8KB RAM容量,128KB Flash容量,zstack2007協議棧。
通信類型:ZigBee組網通信
節點供電:DC 5V
|
|
|
車速油耗模擬監控節點
|
基于ARM Cortex-M3內核處理器,主頻72MHZ,內存:64KB,FLASH:512KB;采用SN65HVD230芯片實現CAN通信接口;
板載電機驅動電路,驅動芯片L298N雙橋直流電機驅動芯片,驅動部分端子供電范圍5-35V,驅動部分峰峰值電流2A,邏輯部分工作電流0-36mA;
控制信號電平:低電平-0.3V
通信調試接口:采用MAX232通信調試接口;
油門監測接口:AD采集接口,用于采集油門調劑旋鈕的旋轉值,通過PWM調節電機的驅動能力,調節當前車速;
外部中斷檢測:實時檢測當前車輪轉速值,計算車當前的車速;
板載超聲波傳感器,距離范圍:2cm-400cm
感應角度:≤15度。
供電:DC12V
|
|
|
直流電機轉動輪裝置
|
含直流編碼器電機、具有霍爾碼器,可實現正反轉切換、急停功能;
工作電壓:12V
工作電流:100mA
轉速:77/min;
要求可通過端子排或香蕉頭插孔和智能節點連接。
|
|
|
高清模擬攝像頭
|
作為行車記錄、倒車影像場景使用。
CMOS攝像頭,像素52萬以上,
接口:BNC
供電電壓:DC12V
|
|
|
通風扇節點
|
節點由微型風扇控制板、ZigBee通信模塊和底板三部分組成;
微控制器I/O輸出控制。
額定電壓:DC5V
額定電流:0.19A
額定轉速:8000轉/分鐘
風量:1.53 CFM
|
|
|
聲光控制節點
|
節點由聲光報警控制板、ZigBee通信模塊和底板三部分組成;
板載1個紅燈、1個藍燈、1個BEEP蜂鳴器。
微控制器I/O輸出控制。
供電電源:DC5V
|
|
|
智能車載導航終端管理軟件
|
默認運行Android系統,具有設備添加、ZigBee/CAN傳感器實時監測、參數配置、行車記錄儀、倒車影像、地圖定位導航等功能項。系統設置主要設置CAN總線的波特率、zigbee協調器的串口號、服務器地址、傳感器上下限與執行器的聯動。設備添加主要用于向系統數據庫添加zigbee節點、CAN設備。行車記錄儀主要模擬車輛行駛過程中的視頻監控。倒車影像主要模擬車輛在倒車時啟動攝像頭進行視頻監控。系統支持導航定位,同時語音提醒道路狀況。當道路發生擁堵時,自動發布。軟件內置MQTT協議,可與WEB客戶端進行即時通訊,實時顯示數據采樣信息和設備狀態,同時通過webservice二次開發接口將數據存入云服務器數據庫,實現歷史數據存儲。
開發環境:Android Studio
|
|
|
智能車載WEB遠程監控平臺
|
采用Java開發,瀏覽器方式訪問。可遠程對多個車輛的運行狀況、環境參數信息進行實時監控。
主要功能:用戶管理、用戶登錄、車載導航網關管理、傳感器設備管理、傳感器數據管理、聯動管理、報警記錄管理、車輛地圖定位等。
內置MQTT協議,可以接收網關發布的消息,解析顯示在頁面。開放Webservice接口供網關調用。
開發環境:ideaIU2016
|