


產(chǎn)品分類
更多相關(guān)產(chǎn)品
- LGWL-JT02型 物聯(lián)網(wǎng)智慧城市交通實訓(xùn)系統(tǒng)
- LGWL-GC01型 智慧工廠應(yīng)用實訓(xùn)系統(tǒng)
- LGWL-CZ01型 開放式車載控制系統(tǒng)
- LGHL-01型 工業(yè)數(shù)據(jù)采集實訓(xùn)臺
- LGHL-02型 工業(yè)互聯(lián)網(wǎng)技術(shù)應(yīng)用實訓(xùn)臺
- LGHL-03型 工業(yè)互聯(lián)網(wǎng)自動化控制實訓(xùn)平臺
- LGHL-04型 工業(yè)互聯(lián)能耗監(jiān)控實訓(xùn)臺
- LGWL-FT01型 物聯(lián)網(wǎng)技術(shù)開發(fā)平臺
- LGWL-ED01型 窄帶物聯(lián)網(wǎng)開發(fā)實驗箱
- LGWL-BIS01型 感知層信息安全實驗箱
- LGWL-JJ01型 物聯(lián)網(wǎng)智能家居教學(xué)實訓(xùn)系統(tǒng)
- LGWL-JT01型 智能交通管理實訓(xùn)系統(tǒng)
- LGWL-JJ02型 網(wǎng)板型智能家居實訓(xùn)系統(tǒng)
- LGWL-MX06型 物聯(lián)網(wǎng)教學(xué)科研平臺
- LG-BCNY01型 智能農(nóng)業(yè)實驗系統(tǒng)
- LG-BCJT03型 智能交通實訓(xùn)系統(tǒng)
- LG-BCJJ04型 智能家居系統(tǒng)(智能家居套裝)
- LG-BCJJ04A型 智能家居實訓(xùn)套裝
- LG-BCJJ05型 智能家居實訓(xùn)系統(tǒng)(柜式)
- LG-BCWL02型 物聯(lián)網(wǎng)綜合應(yīng)用實訓(xùn)系統(tǒng)
- LGWL-JJ03型 物聯(lián)網(wǎng)智能家居實訓(xùn)系統(tǒng)
- LGWL-LJ01型 智能樓宇家居物聯(lián)網(wǎng)考核平臺
- LGWL-NY01型 物聯(lián)網(wǎng)智慧農(nóng)業(yè)綜合實訓(xùn)系統(tǒng)
- LGWL-NY02型 物聯(lián)網(wǎng)農(nóng)業(yè)教學(xué)實訓(xùn)系統(tǒng)
- LGWL-NY03型 智能溫室大棚實訓(xùn)系統(tǒng)
- LGWL-JT02型 物聯(lián)網(wǎng)智能交通教學(xué)實訓(xùn)系統(tǒng)
- LGWL-WL01型 物聯(lián)網(wǎng)智能物流倉儲實訓(xùn)系統(tǒng)
- LGWL-A8型 物聯(lián)網(wǎng)教研平臺(物聯(lián)網(wǎng)實驗箱)
- LGWL-A9型 物聯(lián)網(wǎng)教研平臺(Cortex-A9版)
- LGWL-RFID01型 RFID物聯(lián)網(wǎng)教研平臺(RFID物聯(lián)網(wǎng)實驗箱)
- LGWL-A8Y型 移動互聯(lián)網(wǎng)教學(xué)科研平臺
- LGARM-A8型 ARM嵌入式教學(xué)科研平臺
- LGWL-A8X型 移動互聯(lián)網(wǎng)/物聯(lián)網(wǎng)教學(xué)科研平臺
- LGWL-RFID02型 RFID 物聯(lián)網(wǎng)教學(xué)科研平臺
- LGARM-A89型 物聯(lián)網(wǎng)創(chuàng)意實訓(xùn)平臺
- LGWL-IPv6B型 IPv6 物聯(lián)網(wǎng)全功能實驗箱
- LGWL-A9Y型 移動互聯(lián)網(wǎng)/物聯(lián)網(wǎng)教學(xué)科研平臺
- LGWL-IPV6A型 IPV6無線傳感器網(wǎng)絡(luò)教學(xué)科研平臺
- LGWL-ZB01型 ZigBee無線傳感器網(wǎng)絡(luò)教學(xué)科研平臺
- LGWL-A8M型 無線傳感網(wǎng)教研平臺
LGWL-MSRS01型 物聯(lián)網(wǎng)模塊化教研機(jī)器人平臺
一、產(chǎn)品簡介

物聯(lián)網(wǎng)模塊化機(jī)器人教學(xué)科研平臺,由一群模塊化群體機(jī)器人組成。該模塊機(jī)器人能夠完成群體機(jī)器人的移動、協(xié)同、跟隨等功能,并且可以實現(xiàn)ZigBee的組網(wǎng),實現(xiàn)嵌入式無線通訊;同時多個模塊之間通過自主對接,組裝成運動能力豐富的關(guān)節(jié)機(jī)器人,可以實現(xiàn)蛇形,四足等各種關(guān)節(jié)機(jī)器人的運動。機(jī)器人內(nèi)部集成ARM,AVR,CC2430等模塊,可以用作嵌入式系統(tǒng)和智能物聯(lián)網(wǎng)的研究實驗,同時配合基于MSRS的機(jī)器人仿真軟件,可有效開展機(jī)器人的仿真實驗。平臺融合了群體機(jī)器人、自組裝和自變形機(jī)器人的多重優(yōu)點,是一套功能豐富、配套完善且極具研究價值的實驗平臺。
 二、產(chǎn)品特點
二、產(chǎn)品特點
Swarmbot的控制系統(tǒng)由1個32位處理器STM32F103和4個8位的單片機(jī)ATMega8組成,ARM與單片機(jī)之間采用I2C總線通信而形成主從分布式控制系統(tǒng)。
完全開放的硬件接口,可以實現(xiàn)由頂層到底層的編程與實驗。
ZigBee全局無線通信。采用TI公司的CC2430芯片,用于實現(xiàn)多個Swarmbot機(jī)器人之間的全局無線通信。
機(jī)器人內(nèi)部集成ARM,AVR,CC2430等MCU構(gòu)成嵌入式系統(tǒng)開發(fā)平臺。具有電機(jī)驅(qū)動,位置檢測,LED,按鍵,電流,檢測、紅外測距,光敏等一系列模塊。可以廣泛開展相應(yīng)的實驗研究和教學(xué),并支持?jǐn)U展。
多種層次的算法例程,可有效展開群體機(jī)器人、自組裝機(jī)器人等群體組裝和運動實驗。
Swarmbot機(jī)器人融合了群體機(jī)器人,自組裝機(jī)器人和自重構(gòu)機(jī)器人等多重優(yōu)勢,可以有效開展相關(guān)技術(shù)的融合。
三、硬件資源

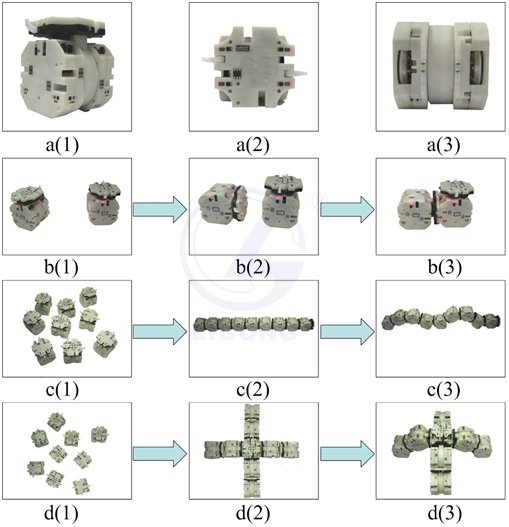 六、機(jī)器人創(chuàng)意組裝
六、機(jī)器人創(chuàng)意組裝
 七、配置清單:
七、配置清單:
物聯(lián)網(wǎng)模塊化機(jī)器人教學(xué)科研平臺,由一群模塊化群體機(jī)器人組成。該模塊機(jī)器人能夠完成群體機(jī)器人的移動、協(xié)同、跟隨等功能,并且可以實現(xiàn)ZigBee的組網(wǎng),實現(xiàn)嵌入式無線通訊;同時多個模塊之間通過自主對接,組裝成運動能力豐富的關(guān)節(jié)機(jī)器人,可以實現(xiàn)蛇形,四足等各種關(guān)節(jié)機(jī)器人的運動。機(jī)器人內(nèi)部集成ARM,AVR,CC2430等模塊,可以用作嵌入式系統(tǒng)和智能物聯(lián)網(wǎng)的研究實驗,同時配合基于MSRS的機(jī)器人仿真軟件,可有效開展機(jī)器人的仿真實驗。平臺融合了群體機(jī)器人、自組裝和自變形機(jī)器人的多重優(yōu)點,是一套功能豐富、配套完善且極具研究價值的實驗平臺。
Swarmbot的控制系統(tǒng)由1個32位處理器STM32F103和4個8位的單片機(jī)ATMega8組成,ARM與單片機(jī)之間采用I2C總線通信而形成主從分布式控制系統(tǒng)。
完全開放的硬件接口,可以實現(xiàn)由頂層到底層的編程與實驗。
ZigBee全局無線通信。采用TI公司的CC2430芯片,用于實現(xiàn)多個Swarmbot機(jī)器人之間的全局無線通信。
機(jī)器人內(nèi)部集成ARM,AVR,CC2430等MCU構(gòu)成嵌入式系統(tǒng)開發(fā)平臺。具有電機(jī)驅(qū)動,位置檢測,LED,按鍵,電流,檢測、紅外測距,光敏等一系列模塊。可以廣泛開展相應(yīng)的實驗研究和教學(xué),并支持?jǐn)U展。
多種層次的算法例程,可有效展開群體機(jī)器人、自組裝機(jī)器人等群體組裝和運動實驗。
Swarmbot機(jī)器人融合了群體機(jī)器人,自組裝機(jī)器人和自重構(gòu)機(jī)器人等多重優(yōu)勢,可以有效開展相關(guān)技術(shù)的融合。
三、硬件資源
| 類別 | 配置 |
| 處理器 | STM32F103CBT6,32位標(biāo)準(zhǔn)RISC處理器 |
| Atmega8L,8位AVR RISC結(jié)構(gòu)單片機(jī) | |
| 接口 | 2個I2C接口(SMBus/PMBus) |
| 3個USART接口 | |
| 2個SPI同步串行接口(18兆位/秒) | |
| CAN接口(2.0B 主動) | |
| USB 2.0全速接口 | |
| 串行線調(diào)試(SWD)和JTAG接口 | |
| 無線通訊模塊 | ZigBee CC2430 |
| 驅(qū)動與傳感器 | 近距離紅外傳感器: 12對 1~150mm |
| 遠(yuǎn)距離紅外傳感器: 4對 0~250mm | |
| ADXRS613陀螺儀(Yaw rate): 150°/s |
四、軟件資源
| 類別 | 軟件資源 |
| 開發(fā)環(huán)境 | 嵌入式集成開發(fā)環(huán)境IAR EWARM |
| 單片機(jī)系統(tǒng) | ATmega8L單片機(jī)系統(tǒng)的學(xué)習(xí)與實驗 |
| 嵌入式ARM系統(tǒng) |
STM32處理器的GPIO、中斷、定時操作及AD轉(zhuǎn)換 GPIO的結(jié)構(gòu)特性、寄存器配置及其示例 嵌套式中斷控制器(NVIC)簡介、外部中斷/事件,(EXTI)控制原理及相關(guān)的寄存器說明 STM32通用定時器的PWM輸出控制 STM32 A/D編程 |
| ZigBee無線通訊 | ZigBee協(xié)議學(xué)習(xí)、開發(fā)與組網(wǎng) |
| 群體機(jī)器人 |
移動機(jī)器人的尋線跟蹤、探測、定位導(dǎo)航和自主避障等實驗 群體機(jī)器人的跟隨、編隊、協(xié)作和自組裝等實驗 多關(guān)節(jié)機(jī)器人的步態(tài)實驗 |
| 仿真環(huán)境 |
基于微軟推出的機(jī)器人開發(fā)平臺 Microsoft Robotic Studio(MSRS) 能夠監(jiān)控狀態(tài)和與單個組件進(jìn)行交互 能夠發(fā)現(xiàn)、創(chuàng)建、停止和重新啟動組件 能夠處理從多個傳感器來的并發(fā)輸入,并將這些并發(fā)輸入變 成互不干擾的消息隊列 能夠處理自治系統(tǒng),也能夠在本地或者通過網(wǎng)絡(luò)控制機(jī)器人 提供的運行時是輕量級的并能夠運行在不同的環(huán)境中 其可擴(kuò)展性和靈活性可以適應(yīng)多種不同的硬件和軟件 |
五、機(jī)器人自組裝流程
| 序號 | 名稱 | 單位 | 數(shù)量 | 備注 |
| 1 | 機(jī)器人節(jié)點 | 個 | 6 | |
| 2 | 電源適配器(DC 8.4V1.2A) | 塊 | 1 | |
| 3 | 編程下載調(diào)試板 | 塊 | 1 | 帶配線 |
| 4 | J-Link仿真器 | 套 | 1 | 帶配線 |
| 5 | ZigBee Debugger仿真器 | 套 | 1 | 帶配線 |
| 6 | 配套光盤 | 張 | 1 | |
| 7 | 產(chǎn)品說明書 | 本 | 1 | 電子版 |