


產(chǎn)品分類
更多相關(guān)產(chǎn)品
- LGWL-JT02型 物聯(lián)網(wǎng)智慧城市交通實訓(xùn)系統(tǒng)
- LGWL-GC01型 智慧工廠應(yīng)用實訓(xùn)系統(tǒng)
- LGWL-CZ01型 開放式車載控制系統(tǒng)
- LGHL-01型 工業(yè)數(shù)據(jù)采集實訓(xùn)臺
- LGHL-02型 工業(yè)互聯(lián)網(wǎng)技術(shù)應(yīng)用實訓(xùn)臺
- LGHL-03型 工業(yè)互聯(lián)網(wǎng)自動化控制實訓(xùn)平臺
- LGHL-04型 工業(yè)互聯(lián)能耗監(jiān)控實訓(xùn)臺
- LGWL-FT01型 物聯(lián)網(wǎng)技術(shù)開發(fā)平臺
- LGWL-ED01型 窄帶物聯(lián)網(wǎng)開發(fā)實驗箱
- LGWL-BIS01型 感知層信息安全實驗箱
- LGWL-JJ01型 物聯(lián)網(wǎng)智能家居教學(xué)實訓(xùn)系統(tǒng)
- LGWL-JT01型 智能交通管理實訓(xùn)系統(tǒng)
- LGWL-JJ02型 網(wǎng)板型智能家居實訓(xùn)系統(tǒng)
- LGWL-MX06型 物聯(lián)網(wǎng)教學(xué)科研平臺
- LG-BCNY01型 智能農(nóng)業(yè)實驗系統(tǒng)
- LG-BCJT03型 智能交通實訓(xùn)系統(tǒng)
- LG-BCJJ04型 智能家居系統(tǒng)(智能家居套裝)
- LG-BCJJ04A型 智能家居實訓(xùn)套裝
- LG-BCJJ05型 智能家居實訓(xùn)系統(tǒng)(柜式)
- LG-BCWL02型 物聯(lián)網(wǎng)綜合應(yīng)用實訓(xùn)系統(tǒng)
- LGWL-JJ03型 物聯(lián)網(wǎng)智能家居實訓(xùn)系統(tǒng)
- LGWL-LJ01型 智能樓宇家居物聯(lián)網(wǎng)考核平臺
- LGWL-NY01型 物聯(lián)網(wǎng)智慧農(nóng)業(yè)綜合實訓(xùn)系統(tǒng)
- LGWL-NY02型 物聯(lián)網(wǎng)農(nóng)業(yè)教學(xué)實訓(xùn)系統(tǒng)
- LGWL-NY03型 智能溫室大棚實訓(xùn)系統(tǒng)
- LGWL-JT02型 物聯(lián)網(wǎng)智能交通教學(xué)實訓(xùn)系統(tǒng)
- LGWL-WL01型 物聯(lián)網(wǎng)智能物流倉儲實訓(xùn)系統(tǒng)
- LGWL-A8型 物聯(lián)網(wǎng)教研平臺(物聯(lián)網(wǎng)實驗箱)
- LGWL-A9型 物聯(lián)網(wǎng)教研平臺(Cortex-A9版)
- LGWL-RFID01型 RFID物聯(lián)網(wǎng)教研平臺(RFID物聯(lián)網(wǎng)實驗箱)
- LGWL-A8Y型 移動互聯(lián)網(wǎng)教學(xué)科研平臺
- LGARM-A8型 ARM嵌入式教學(xué)科研平臺
- LGWL-A8X型 移動互聯(lián)網(wǎng)/物聯(lián)網(wǎng)教學(xué)科研平臺
- LGWL-RFID02型 RFID 物聯(lián)網(wǎng)教學(xué)科研平臺
- LGARM-A89型 物聯(lián)網(wǎng)創(chuàng)意實訓(xùn)平臺
- LGWL-IPv6B型 IPv6 物聯(lián)網(wǎng)全功能實驗箱
- LGWL-A9Y型 移動互聯(lián)網(wǎng)/物聯(lián)網(wǎng)教學(xué)科研平臺
- LGWL-IPV6A型 IPV6無線傳感器網(wǎng)絡(luò)教學(xué)科研平臺
- LGWL-ZB01型 ZigBee無線傳感器網(wǎng)絡(luò)教學(xué)科研平臺
- LGWL-A8M型 無線傳感網(wǎng)教研平臺
LGWL-LOG01型 物流立體倉庫實訓(xùn)系統(tǒng)
一、系統(tǒng)簡介
LGWL-LOG01型 物流立體倉庫實訓(xùn)系統(tǒng)根據(jù)實際物流倉儲中使用的立體倉庫為模板,進行相應(yīng)的縮小和適當(dāng)?shù)暮喕O(shè)計完成的具有實際操作功能和實驗功能的一套裝置。該裝置采用履帶式輸送帶及鋁合金框架組成,采用物聯(lián)網(wǎng)技術(shù)與機械控制技術(shù),通過中央控制器立體倉庫管理系統(tǒng),遠程接收倉庫傳感器系統(tǒng)采集的信息,經(jīng)過處理,遠程控制各個設(shè)備的控制器,完成指定貨物的自動出庫、堆垛機搬運、車輛運輸、皮帶傳送、自動入庫等主要倉儲作業(yè)任務(wù)。
網(wǎng)現(xiàn)代物流倉庫實訓(xùn)系統(tǒng)")
系統(tǒng)") 整個系統(tǒng)的流程為:
整個系統(tǒng)的流程為:
入庫時,立體倉庫管理系統(tǒng)分配庫位。入庫產(chǎn)品經(jīng)過超高頻RFID檢測后,通過輸送帶運送到全自動立體倉庫入庫口,自動貨物搬運機器在管理系統(tǒng)的智能處理下快速找到入庫產(chǎn)品在貨架上的準(zhǔn)確庫位,并把貨物準(zhǔn)確地移送到庫位上進行保存,立體倉庫管理系統(tǒng)庫位信息更新。
出庫時,立體倉庫管理系統(tǒng)指定庫位。自動貨物搬運機器在立體倉庫管理系統(tǒng)的控制下,準(zhǔn)確地移動到待出庫產(chǎn)品的庫位處,搬運出庫產(chǎn)品至接貨的貨車上。貨車經(jīng)過出庫通道的RFID檢測后正常出庫。出庫成功后,立體倉庫管理系統(tǒng)庫位信息更新。
二、系統(tǒng)構(gòu)成
LGWL-LOG01型 物流立體倉庫實訓(xùn)系統(tǒng)覆蓋物聯(lián)網(wǎng)的傳感層、網(wǎng)絡(luò)鏈路層、網(wǎng)關(guān)、以及應(yīng)用層。網(wǎng)關(guān)是整個系統(tǒng)的核心,是連接傳感層與應(yīng)用層的橋梁。系統(tǒng)拓?fù)淙鐖D所示。
系統(tǒng)")
1、出入庫系統(tǒng)
入庫系統(tǒng)主要實現(xiàn)貨物入庫的智能化管理。首先為每個待入庫貨物粘貼超高頻電子標(biāo)簽,給每個貨物一個標(biāo)識。由立庫管理系統(tǒng)為該貨物分配一個庫位。
入庫通道安裝有RFID批量數(shù)據(jù)信息采集器、機器臂、PVC皮帶輸送機等設(shè)備。系統(tǒng)利用RFID設(shè)備的識別技術(shù)將入庫貨物接入物聯(lián)網(wǎng)網(wǎng)關(guān)運行的管理系統(tǒng)中。貨物運輸車輛運送貨物到達倉庫入庫口,機器臂將車輛貨物搬運到PVC皮帶輸送機上,此時PVC皮帶輸送機開始運轉(zhuǎn),皮帶帶動貨物從倉庫外向倉庫內(nèi)輸送。當(dāng)皮帶帶動貨物移動到輸送機一端的紅外對射傳感器處時停止輸送,由堆垛機搬運貨物至立體倉庫內(nèi)。
出庫時,首先在中央控制器的管理軟件上選擇出貨庫位,然后系統(tǒng)將控制模擬堆垛機移動到相應(yīng)庫位的上方;然后系統(tǒng)控制庫位滑臺控制器,驅(qū)動絲杠旋轉(zhuǎn),移出滑臺和庫位;然后控制模擬堆垛機沿豎直方向向下運行達到貨物處,抓取貨物。庫位退回到原處。*后堆垛機移出貨物,搬運到運貨車輛上即可。
2、貨物上下架
上架:當(dāng)貨物由皮帶輸送機運輸?shù)絺}庫內(nèi)時,中央控制器將驅(qū)動模擬堆垛機移動,使其移動到貨物上方,抓取貨物后,再移動到相應(yīng)的庫位上方。然后中央控制器控制絲杠滑臺驅(qū)動器動作,使相應(yīng)的庫位伸出至貨物的下方。再由中央控制器控制模擬堆垛機沿豎直方向移動,將貨物放到庫位上,模擬堆垛機退回到初始位置。*后絲杠滑臺驅(qū)動器動作,縮回移動桿,將庫位拉回到倉庫內(nèi)。*終完成貨物上架功能。
下架:當(dāng)貨物需要從指定庫位移出,仍然由中央控制器協(xié)調(diào)控制庫位的絲杠滑臺驅(qū)動器與模擬堆垛機驅(qū)動器交替配合工作,*終將貨物放到前來拉貨的運輸車上。
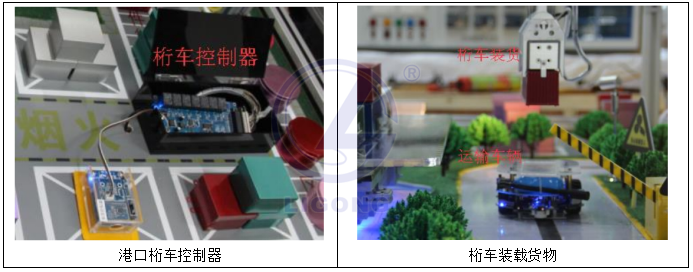
3、模擬堆垛機裝卸貨系統(tǒng)
模擬堆垛機裝卸貨系統(tǒng),是立體倉庫的重要組成部分,主要由多自由度全方位電機構(gòu)成,采用單片機控制運動軌跡。管理平臺通過無線無線通信向模擬堆垛機控制器發(fā)出貨物上架、下架指令,堆垛機控制器接收到命令后,就按照指定的取貨位置,操作X/Y/Z軸電機運動,從而實現(xiàn)貨物的自動裝卸。貨物裝卸完成后,運輸車自動離開。
該模擬堆垛機結(jié)構(gòu)合理、剛性好,運行平穩(wěn)、噪聲小,全自動程控運行,能夠穩(wěn)定可靠地實現(xiàn)貨物的全方位抓取與放置。
 4、庫位伸縮系統(tǒng)
4、庫位伸縮系統(tǒng)
庫位伸縮系統(tǒng),是該立體倉庫實訓(xùn)系統(tǒng)的特色。傳統(tǒng)庫位是不移動。在該實訓(xùn)系統(tǒng)中,庫位是可伸縮移動的。它主要由電動絲杠滑臺、滑臺驅(qū)動器、滑臺控制器三部分組成,安裝在鋁合金框架內(nèi),形成一個至少4庫位的立體倉庫。滑臺驅(qū)動器是一個步進電機驅(qū)動器,用來驅(qū)動電動絲杠滑臺旋轉(zhuǎn),實現(xiàn)滑塊的旋出或旋進。滑臺控制器通過ZigBee與中央控制器無線通信,接收中央控制器的控制命令,通過有線方式控制滑臺驅(qū)動器工作,從而實現(xiàn)庫位的伸出或拉回。
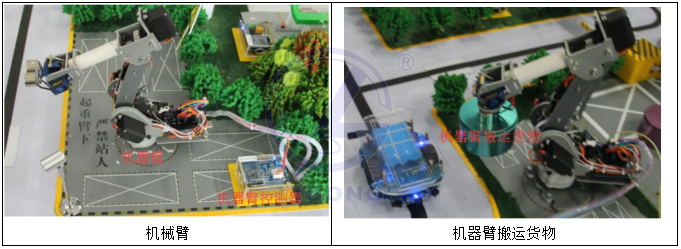
5、機器臂裝卸貨系統(tǒng)
對于不規(guī)則貨物,可采用機器臂控制系統(tǒng)裝卸貨。六自由度機械臂的臂部由大臂、小臂組成,一般具有兩個自由度,即伸縮、回轉(zhuǎn)、俯仰或升降,采用單片機控制運動軌跡。當(dāng)小車到達裝卸貨指定地點時,通過無線向管理平臺發(fā)出命令,管理平臺接收到后,通過無線通信向機器臂控制器發(fā)送裝卸貨指令,控制器接收到命令后,就按照指定的取貨位置,操作機器臂經(jīng)過回轉(zhuǎn)、伸縮、升降、俯仰等幾組動作組合,實現(xiàn)貨物的自動裝卸。貨物裝卸完成后,運輸車自動離開。
 6、出入庫道閘系統(tǒng)
6、出入庫道閘系統(tǒng)
出入庫道閘系統(tǒng)( 又稱智能車輛識別),利用車輛自動識別(Automatic Vehicle Identification簡稱AVI)技術(shù)、網(wǎng)絡(luò)技術(shù)完成車輛與中央控制器之間的無線數(shù)據(jù)通訊,實現(xiàn)智能開啟道閘、自動關(guān)閉道閘的功能。使用該系統(tǒng),運輸車輛上的讀寫器通過檢測鋪設(shè)在道路上的電子標(biāo)簽,確認(rèn)車輛行駛的位置,通過與中央控制器協(xié)調(diào)工作,經(jīng)過出入口時便不用人工開啟道閘,也無須停車,將自動識別車主身份從而開啟道閘。
而且當(dāng)小車出入倉庫時,車輛信息將在LCD廣播屏上顯示出來,同時進行語音播報當(dāng)前車輛出入庫信息。
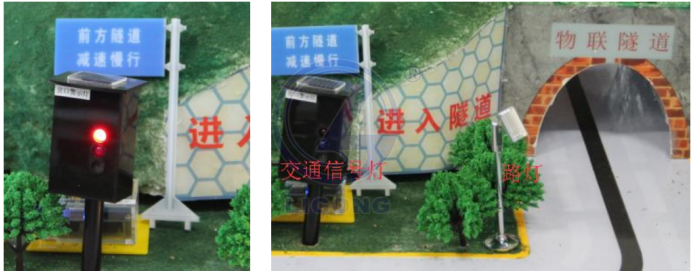
7、 智能路燈管理
實訓(xùn)系統(tǒng)臺面鋪設(shè)有若干路燈以及路燈控制器,與光線傳感器協(xié)調(diào)工作,模擬車輛運輸?shù)缆飞系穆窡艄芾硐到y(tǒng)。
系統(tǒng)根據(jù)光線傳感器采集的光亮度值自動控制路燈的打開和關(guān)閉。當(dāng)光亮度值低于某一個閾值時,即打開路燈,當(dāng)光亮度值高于某一個閾值時,關(guān)閉路燈,達到節(jié)能的目的。
 8、貨物數(shù)據(jù)庫管理軟件
8、貨物數(shù)據(jù)庫管理軟件
系統(tǒng)存在兩種射頻頻段,一種是低頻頻段,主要由智能車輛上的低頻讀寫器與鋪設(shè)在道路上的低頻卡組成。智能車輛行駛到低頻卡處,由車輛上搭載的ZigBee通信模塊發(fā)送給中央處理網(wǎng)關(guān),由網(wǎng)關(guān)進行下一步的邏輯控制。另一種是超高頻頻段,主要由一體式超高頻讀寫器與超高頻電子標(biāo)簽組成。超高頻電子標(biāo)簽粘貼在貨物上,用于出入庫通道掃描識別以及倉庫貨物的自動盤點。
另外,系統(tǒng)中每個設(shè)備都作為ZigBee節(jié)點接入到無線傳感器網(wǎng)絡(luò)中,因此每個設(shè)備都具有唯一標(biāo)識的MAC地址,系統(tǒng)需存儲所有設(shè)備的MAC地址作為系統(tǒng)通信的唯一標(biāo)示符。因此系統(tǒng)中存在三種數(shù)據(jù)表,一種是低頻數(shù)據(jù)信息表,一種是超高頻數(shù)據(jù)信息表,還有一種是設(shè)備的MAC地址信息表。
9、立體倉庫管理軟件
立體倉庫管理軟件運行在整個系統(tǒng)的中央控制器上,軟件采用Linux系統(tǒng)開發(fā),內(nèi)嵌Sqlite數(shù)據(jù)庫,采用Qt庫編寫的人機交互界面,主要包括貨物自動識別、車輛識別、出入庫管理、倉庫貨物自動盤點等。
LGWL-LOG01型 物流立體倉庫實訓(xùn)系統(tǒng)根據(jù)實際物流倉儲中使用的立體倉庫為模板,進行相應(yīng)的縮小和適當(dāng)?shù)暮喕O(shè)計完成的具有實際操作功能和實驗功能的一套裝置。該裝置采用履帶式輸送帶及鋁合金框架組成,采用物聯(lián)網(wǎng)技術(shù)與機械控制技術(shù),通過中央控制器立體倉庫管理系統(tǒng),遠程接收倉庫傳感器系統(tǒng)采集的信息,經(jīng)過處理,遠程控制各個設(shè)備的控制器,完成指定貨物的自動出庫、堆垛機搬運、車輛運輸、皮帶傳送、自動入庫等主要倉儲作業(yè)任務(wù)。
入庫時,立體倉庫管理系統(tǒng)分配庫位。入庫產(chǎn)品經(jīng)過超高頻RFID檢測后,通過輸送帶運送到全自動立體倉庫入庫口,自動貨物搬運機器在管理系統(tǒng)的智能處理下快速找到入庫產(chǎn)品在貨架上的準(zhǔn)確庫位,并把貨物準(zhǔn)確地移送到庫位上進行保存,立體倉庫管理系統(tǒng)庫位信息更新。
出庫時,立體倉庫管理系統(tǒng)指定庫位。自動貨物搬運機器在立體倉庫管理系統(tǒng)的控制下,準(zhǔn)確地移動到待出庫產(chǎn)品的庫位處,搬運出庫產(chǎn)品至接貨的貨車上。貨車經(jīng)過出庫通道的RFID檢測后正常出庫。出庫成功后,立體倉庫管理系統(tǒng)庫位信息更新。
二、系統(tǒng)構(gòu)成
LGWL-LOG01型 物流立體倉庫實訓(xùn)系統(tǒng)覆蓋物聯(lián)網(wǎng)的傳感層、網(wǎng)絡(luò)鏈路層、網(wǎng)關(guān)、以及應(yīng)用層。網(wǎng)關(guān)是整個系統(tǒng)的核心,是連接傳感層與應(yīng)用層的橋梁。系統(tǒng)拓?fù)淙鐖D所示。
物流立體倉庫實訓(xùn)系統(tǒng)框架圖
三、系統(tǒng)功能1、出入庫系統(tǒng)
入庫系統(tǒng)主要實現(xiàn)貨物入庫的智能化管理。首先為每個待入庫貨物粘貼超高頻電子標(biāo)簽,給每個貨物一個標(biāo)識。由立庫管理系統(tǒng)為該貨物分配一個庫位。
入庫通道安裝有RFID批量數(shù)據(jù)信息采集器、機器臂、PVC皮帶輸送機等設(shè)備。系統(tǒng)利用RFID設(shè)備的識別技術(shù)將入庫貨物接入物聯(lián)網(wǎng)網(wǎng)關(guān)運行的管理系統(tǒng)中。貨物運輸車輛運送貨物到達倉庫入庫口,機器臂將車輛貨物搬運到PVC皮帶輸送機上,此時PVC皮帶輸送機開始運轉(zhuǎn),皮帶帶動貨物從倉庫外向倉庫內(nèi)輸送。當(dāng)皮帶帶動貨物移動到輸送機一端的紅外對射傳感器處時停止輸送,由堆垛機搬運貨物至立體倉庫內(nèi)。
出庫時,首先在中央控制器的管理軟件上選擇出貨庫位,然后系統(tǒng)將控制模擬堆垛機移動到相應(yīng)庫位的上方;然后系統(tǒng)控制庫位滑臺控制器,驅(qū)動絲杠旋轉(zhuǎn),移出滑臺和庫位;然后控制模擬堆垛機沿豎直方向向下運行達到貨物處,抓取貨物。庫位退回到原處。*后堆垛機移出貨物,搬運到運貨車輛上即可。
2、貨物上下架
上架:當(dāng)貨物由皮帶輸送機運輸?shù)絺}庫內(nèi)時,中央控制器將驅(qū)動模擬堆垛機移動,使其移動到貨物上方,抓取貨物后,再移動到相應(yīng)的庫位上方。然后中央控制器控制絲杠滑臺驅(qū)動器動作,使相應(yīng)的庫位伸出至貨物的下方。再由中央控制器控制模擬堆垛機沿豎直方向移動,將貨物放到庫位上,模擬堆垛機退回到初始位置。*后絲杠滑臺驅(qū)動器動作,縮回移動桿,將庫位拉回到倉庫內(nèi)。*終完成貨物上架功能。
下架:當(dāng)貨物需要從指定庫位移出,仍然由中央控制器協(xié)調(diào)控制庫位的絲杠滑臺驅(qū)動器與模擬堆垛機驅(qū)動器交替配合工作,*終將貨物放到前來拉貨的運輸車上。
3、模擬堆垛機裝卸貨系統(tǒng)
模擬堆垛機裝卸貨系統(tǒng),是立體倉庫的重要組成部分,主要由多自由度全方位電機構(gòu)成,采用單片機控制運動軌跡。管理平臺通過無線無線通信向模擬堆垛機控制器發(fā)出貨物上架、下架指令,堆垛機控制器接收到命令后,就按照指定的取貨位置,操作X/Y/Z軸電機運動,從而實現(xiàn)貨物的自動裝卸。貨物裝卸完成后,運輸車自動離開。
該模擬堆垛機結(jié)構(gòu)合理、剛性好,運行平穩(wěn)、噪聲小,全自動程控運行,能夠穩(wěn)定可靠地實現(xiàn)貨物的全方位抓取與放置。
庫位伸縮系統(tǒng),是該立體倉庫實訓(xùn)系統(tǒng)的特色。傳統(tǒng)庫位是不移動。在該實訓(xùn)系統(tǒng)中,庫位是可伸縮移動的。它主要由電動絲杠滑臺、滑臺驅(qū)動器、滑臺控制器三部分組成,安裝在鋁合金框架內(nèi),形成一個至少4庫位的立體倉庫。滑臺驅(qū)動器是一個步進電機驅(qū)動器,用來驅(qū)動電動絲杠滑臺旋轉(zhuǎn),實現(xiàn)滑塊的旋出或旋進。滑臺控制器通過ZigBee與中央控制器無線通信,接收中央控制器的控制命令,通過有線方式控制滑臺驅(qū)動器工作,從而實現(xiàn)庫位的伸出或拉回。
5、機器臂裝卸貨系統(tǒng)
對于不規(guī)則貨物,可采用機器臂控制系統(tǒng)裝卸貨。六自由度機械臂的臂部由大臂、小臂組成,一般具有兩個自由度,即伸縮、回轉(zhuǎn)、俯仰或升降,采用單片機控制運動軌跡。當(dāng)小車到達裝卸貨指定地點時,通過無線向管理平臺發(fā)出命令,管理平臺接收到后,通過無線通信向機器臂控制器發(fā)送裝卸貨指令,控制器接收到命令后,就按照指定的取貨位置,操作機器臂經(jīng)過回轉(zhuǎn)、伸縮、升降、俯仰等幾組動作組合,實現(xiàn)貨物的自動裝卸。貨物裝卸完成后,運輸車自動離開。
出入庫道閘系統(tǒng)( 又稱智能車輛識別),利用車輛自動識別(Automatic Vehicle Identification簡稱AVI)技術(shù)、網(wǎng)絡(luò)技術(shù)完成車輛與中央控制器之間的無線數(shù)據(jù)通訊,實現(xiàn)智能開啟道閘、自動關(guān)閉道閘的功能。使用該系統(tǒng),運輸車輛上的讀寫器通過檢測鋪設(shè)在道路上的電子標(biāo)簽,確認(rèn)車輛行駛的位置,通過與中央控制器協(xié)調(diào)工作,經(jīng)過出入口時便不用人工開啟道閘,也無須停車,將自動識別車主身份從而開啟道閘。
而且當(dāng)小車出入倉庫時,車輛信息將在LCD廣播屏上顯示出來,同時進行語音播報當(dāng)前車輛出入庫信息。
7、 智能路燈管理
實訓(xùn)系統(tǒng)臺面鋪設(shè)有若干路燈以及路燈控制器,與光線傳感器協(xié)調(diào)工作,模擬車輛運輸?shù)缆飞系穆窡艄芾硐到y(tǒng)。
系統(tǒng)根據(jù)光線傳感器采集的光亮度值自動控制路燈的打開和關(guān)閉。當(dāng)光亮度值低于某一個閾值時,即打開路燈,當(dāng)光亮度值高于某一個閾值時,關(guān)閉路燈,達到節(jié)能的目的。
系統(tǒng)存在兩種射頻頻段,一種是低頻頻段,主要由智能車輛上的低頻讀寫器與鋪設(shè)在道路上的低頻卡組成。智能車輛行駛到低頻卡處,由車輛上搭載的ZigBee通信模塊發(fā)送給中央處理網(wǎng)關(guān),由網(wǎng)關(guān)進行下一步的邏輯控制。另一種是超高頻頻段,主要由一體式超高頻讀寫器與超高頻電子標(biāo)簽組成。超高頻電子標(biāo)簽粘貼在貨物上,用于出入庫通道掃描識別以及倉庫貨物的自動盤點。
另外,系統(tǒng)中每個設(shè)備都作為ZigBee節(jié)點接入到無線傳感器網(wǎng)絡(luò)中,因此每個設(shè)備都具有唯一標(biāo)識的MAC地址,系統(tǒng)需存儲所有設(shè)備的MAC地址作為系統(tǒng)通信的唯一標(biāo)示符。因此系統(tǒng)中存在三種數(shù)據(jù)表,一種是低頻數(shù)據(jù)信息表,一種是超高頻數(shù)據(jù)信息表,還有一種是設(shè)備的MAC地址信息表。
9、立體倉庫管理軟件
立體倉庫管理軟件運行在整個系統(tǒng)的中央控制器上,軟件采用Linux系統(tǒng)開發(fā),內(nèi)嵌Sqlite數(shù)據(jù)庫,采用Qt庫編寫的人機交互界面,主要包括貨物自動識別、車輛識別、出入庫管理、倉庫貨物自動盤點等。