


更多相關產品
- LGPFSM-3網絡型可編程控制器綜合實訓裝置(西門子)
- LGPFOR-2網絡型可編程控制器綜合實訓裝置(歐姆龍)
- LGPFSF-1A/1B可編程序控制系統設計師綜合實訓裝置
- LGPFSF-2A/2B可編程序控制系統設計師綜合實訓裝置
- LGPSOR-1PLC-步進伺服控制綜合實訓平臺(歐姆龍) (配二軸定位模型)
- LGW-XC01型 小車運動控制模型裝置
- LG-ADMC01型 工業自動化電氣控制綜合實訓考核裝置
- LGSX-01型 PLC可編程控制器實訓裝置
- LGSX-01A型 網絡型PLC可編程控制器綜合實訓裝置(PLC+變頻+電氣控制+觸摸屏)
- LGSX-01B型 PLC可編程控制器綜合實訓裝置
- LGSX-02B型 PLC可編程控制器、單片機開發應用及變頻調速綜合實訓裝置
- LGSX-02A型 PLC可編程控制器、單片機開發應用及電氣控制綜合實訓裝置
- LGSX-02C型 PLC可編程控制器、變頻調速綜合實訓裝置
- LGSX-03A型 工業自動化綜合實訓裝置(PLC+變頻器+觸摸屏+單片機)
- LGSX-03B型 工業自動化綜合實訓裝置
- LGH-01型 車身保全三菱Q系列PLC實訓與考核綜合裝置
- LGH-02型 車身保全三菱Q系列PLC實訓與考核綜合裝置(含電機執行機構)
- LGSX-04A型 單片機、自動控制、計算機控制技術、信號與系統綜合實驗裝置
- LGSX-04B型 單片機開發應用技術綜合實驗裝置
- LGSX-03C型 工業自動化實驗考核裝置
- LGM-S02型 三菱PLC實訓裝置
- LGM-S03型 西門子S7-300PLC綜合實訓實驗裝置
- LG-ND03型 單片機技術實訓裝置
- LGN-05A型 計算機組成原理、微機接口及應用綜合實驗臺
- LGN-05B型 網絡接口型單片機?微機綜合實驗開發裝置
- LGN-06A型 信號與系統?控制理論?計算機控制技術實驗平臺
- LGN-06B型 單片機?CPLD-FPGA開發綜合實驗裝置
- LGN-06C型 高級單片機、EDA開發實驗裝置
- LGS-01B型 PLC可編程控制系統、單片機實驗開發系統,自動控制原理綜合實驗裝置
- LGS-01C型 PLC可編程控制系統、微機接口及微機應用綜合實驗裝置
- LGS-02A型 PLC可編程控制器實驗裝置
- LGS-02B型 PLC可編程控制、單片機開發系統、自動控制原理綜合實驗裝置
- LGS-02C型 PLC可編程控制器、微機接口及微機應用綜合實驗裝置
- LGS-01A型 PLC可編程控制實驗及單片機實驗開發系統綜合實驗裝置
- LGS-02D型 PLC 可編程控制器、變頻調速綜合實驗裝置(網絡型)
- LGS-03型 網絡型PLC可編程控制器實驗裝置
- LGS-03A型 網絡型PLC可編程控制及單片機實驗開發系統綜合實驗裝置
- LGS-03B型 網絡型PLC可編程控制器、單片機開發系統、自動控制原理綜合實驗裝置
- LGS-04A型 網絡型PLC可編程控制器、變頻調速及電氣控制實驗裝置
- LGS-04B型 網絡型PLC可編程控制器、變頻調速、電氣控制及單片機實驗開發系統綜合實驗裝置
LG-EWK03型 二維運動控制實驗平臺(單片機控制)
一、LG-EWK03型 二維運動控制實驗平臺(單片機控制)概述
LG-EWK03型 二維運動控制實驗平臺(單片機控制)是集運動控制卡、單片機開發控制板、步進電機及驅動器、開關電源、XY控制平臺及運動控制軟件于一體的理想教學實驗系統。XY控制臺是一個采用滾珠絲杠傳動的模塊化十字工作臺,可以實現平面內X、Y軸方向的運動控制,用于實現目標軌跡和動作。二維運動控制實驗平臺(單片機控制)系統軟件包括基于軸的控制、基于坐標系的控制、命令編輯和運行、數控代碼編輯和運行、復雜運動軌跡控制。

1、定位精度:0.4mm
2、X軸有效行程:230mm;Y軸有效行程:230mm;*大運動速度:20mm/s;*大運動加速度:1g
3、輸入電源:220V±10%(50Hz)
4、工作環境:溫度-10℃~+40℃ 相對濕度<85%(25℃) 海拔<4000m
5、裝置容量:≤1.2kVA
6、外形尺寸:45cm×45cm×75cm
三、系統結構及組成
LG-EWK03型 二維運動控制實驗平臺主要由步進電機控制系統和電腦桌兩部分組成,結構框圖如下圖所示:
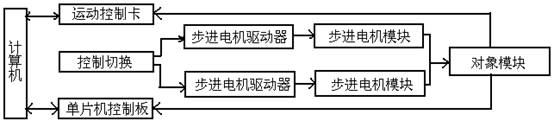
系統結構框圖
步進電機二個:采用二個2相步進電動機,分別為XY兩個方向布置,X軸運動行程為230mm,Y軸運動行程為230mm。
(2)51單片機開發控制板
單片機開發控制板,主CPU為AT89S52,帶下載接口(編程電纜,編程軟件),所有接口資源引出,供用戶使用。并配置相應控制開關按鈕。
(3)運動控制卡一塊
32位PCI總線,即插即用
所有輸入、輸出均采用光耦隔離,抗干擾性強
2軸伺服/步進電機控制,每軸可獨立運動,互不影響
脈沖輸出的頻率誤差小于0.1%
*大脈沖輸出頻率為2MHz
脈沖輸出可用單脈沖(脈沖+方向)或雙脈沖(脈沖+脈沖)方式
梯形加/減速
任意2軸直線插補
*大插補速度1MHz
運動中可以實時讀出邏輯位置、實際位置、驅動速度
24路數字輸入,12路輸出
每軸兩個限位輸入,可設置成無效,作為通用輸入使用
支持在一個系統中使用多達16個控制卡
支持DOS、WINDOWS95/98/NT/2000/XP/WINCE等操作系統
(4)步進電機驅動器二個
輸出電流:*大電流為2A
輸出方式:光光耦合器·開路集電極輸出
(5)穩壓直流電源 一個
輸出電流:*大輸出電流為5A
輸出電壓:24V
輸出功率:120w
(6)運動控制卡接口板 一塊
為運動控制卡提供接口端子,可根據自己的需要進行相應的接線,實現接線的靈活及開放性。
(7)實驗平臺信號接口板 一塊
用以實現PLC和運動控制卡與實驗平臺的信號連接,在同一時刻只能一種控制起作用。
(8)腦桌一張(選配)
(9)計算機一臺(用戶自備)
用于安裝單片機集成開發環境KEIL C、編程下載軟件,主要完成程序的編寫、修改、編譯、軟件仿真等功能,*后通過編程下載軟件裝載到單片機內部FLASH ROM中運行。還用于運行控制卡上位軟件的開發、運行。
硬件配置:基本配置要求P4 3.OG以上,內存至少為256M,至少有一個USB接口、一個并行口、一個Rs232串口和一個空閑PCI插槽。操作系統:Windows XP(專業版)+SP2。
四、實驗項目
(一)基礎實驗
1、單片機的認識和操作實驗
2、單片機集成開發環境KEIL C的認識實驗
3、單片機在線編程軟件的認識與使用
4、單片機基本編程練習實驗
(二)基于51單片機控制的系統性實驗
6、基于51單片機控制的單軸實驗
7、基于51單片機控制的兩軸聯動控制實驗
8、基于51單片機控制的任意路線物料搬運實驗
(三)基于運動控制卡控制的系統性實驗
9、基于運動控制卡控制的單軸實驗
10、基于運動控制卡控制的兩軸聯動實驗
11、基于運動控制卡控制的任意路線物料搬運實驗
五、運動控制卡可用以下開發工具:
1、CBuilder Borland C++Bulider 6 工具開發的基本庫函數示例程序及源代碼
2、Dephi Borland Dephi 6 工具開發的基本庫函數示例程序及源代碼
3、Vb Microsoft Visual basic工具開發的基本庫函數示例程序及源代碼
4、VC Microsoft Visual C++ 工具開發的基本庫函數示例程序及源代碼